
基于模型控制的并联机构机器人腿简化建模与辨识方法研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于模型控制的并联机构机器人腿简化建模与辨识方法研究.docx
基于模型控制的并联机构机器人腿简化建模与辨识方法研究基于模型控制的并联机构机器人腿简化建模与辨识方法研究摘要:随着机器人技术的快速发展,机器人腿部并联机构的研究日益重要。本文旨在研究基于模型控制的并联机构机器人腿的简化建模与辨识方法。首先介绍了机器人腿的背景和意义,然后详细探讨了并联机构的结构和工作原理。随后,利用系统辨识方法对机器人腿的动力学模型进行建立。最后,通过模型控制方法实现对机器人腿的控制。1.引言随着科技的不断进步,机器人技术已经广泛应用于工业生产、医疗保健、教育等领域。机器人腿作为一种重要的

Stewart机器人模型辨识及控制方法研究的开题报告.docx
Stewart机器人模型辨识及控制方法研究的开题报告一、选题背景和意义现今,机器人在人们生产、生活和军事领域中的应用日益广泛,而机器人的自主控制系统作为其核心,是实现机器人智能化和高效化的重要手段。机器人控制系统中的模型辨识和控制方法,能够有效地提高机器人的精度、速度和稳定性,并且能够让机器人更好地适应复杂的环境和任务。Stewart机器人是一种具有六自由度的并联机构,由于其重量轻,刚度高,能够进行多种动作控制等特点,成为近年来应用广泛的平台之一。然而,Stewart平台的模型辨识和控制方法研究相对较少,
轮-腿复合并联腿机构及水下机器人.pdf
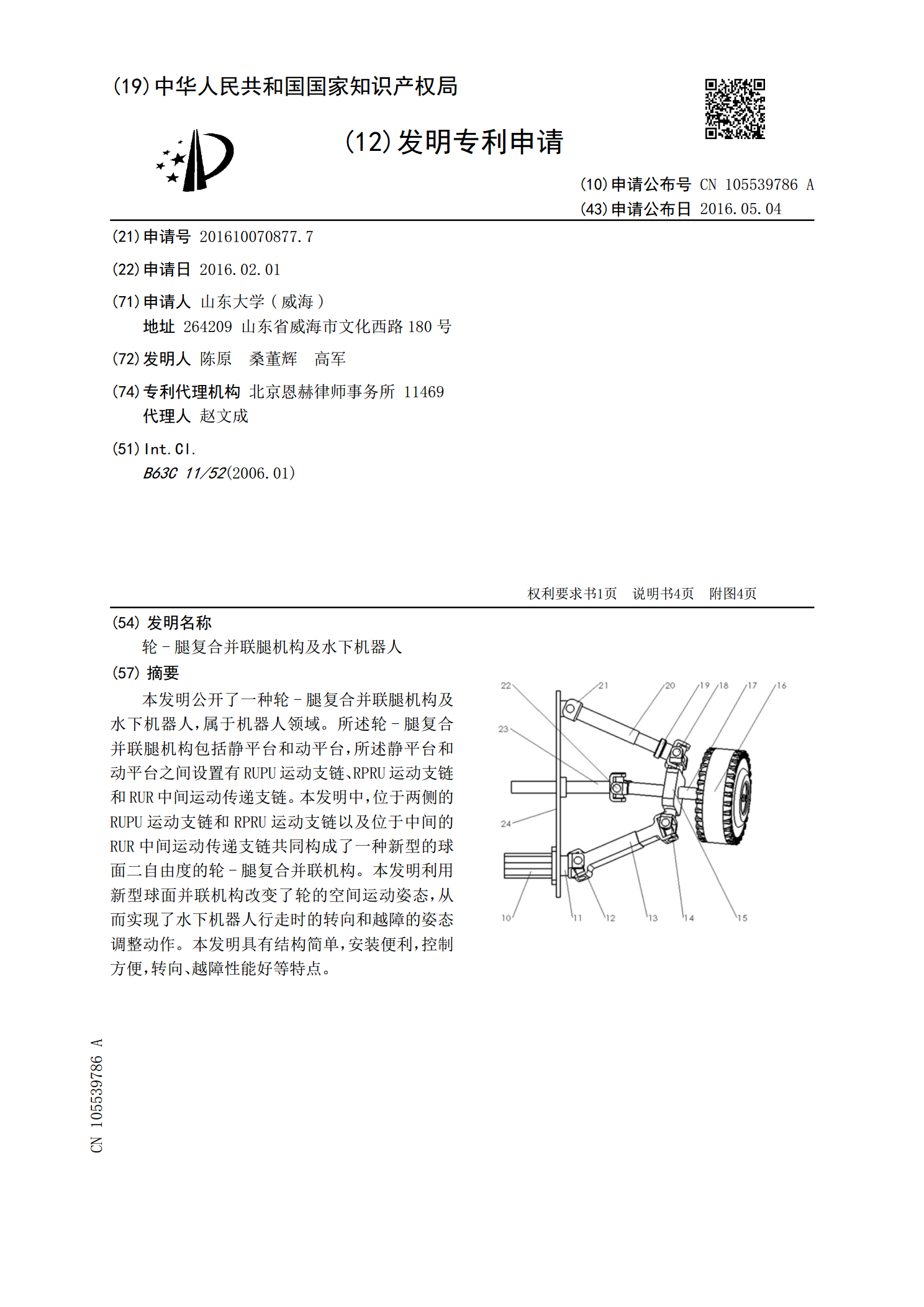
本发明公开了一种轮-腿复合并联腿机构及水下机器人,属于机器人领域。所述轮-腿复合并联腿机构包括静平台和动平台,所述静平台和动平台之间设置有RUPU运动支链、RPRU运动支链和RUR中间运动传递支链。本发明中,位于两侧的RUPU运动支链和RPRU运动支链以及位于中间的RUR中间运动传递支链共同构成了一种新型的球面二自由度的轮-腿复合并联机构。本发明利用新型球面并联机构改变了轮的空间运动姿态,从而实现了水下机器人行走时的转向和越障的姿态调整动作。本发明具有结构简单,安装便利,控制方便,转向、越障性能好等特点。
基于球面并联机构的轮腿式移动机器人.pdf
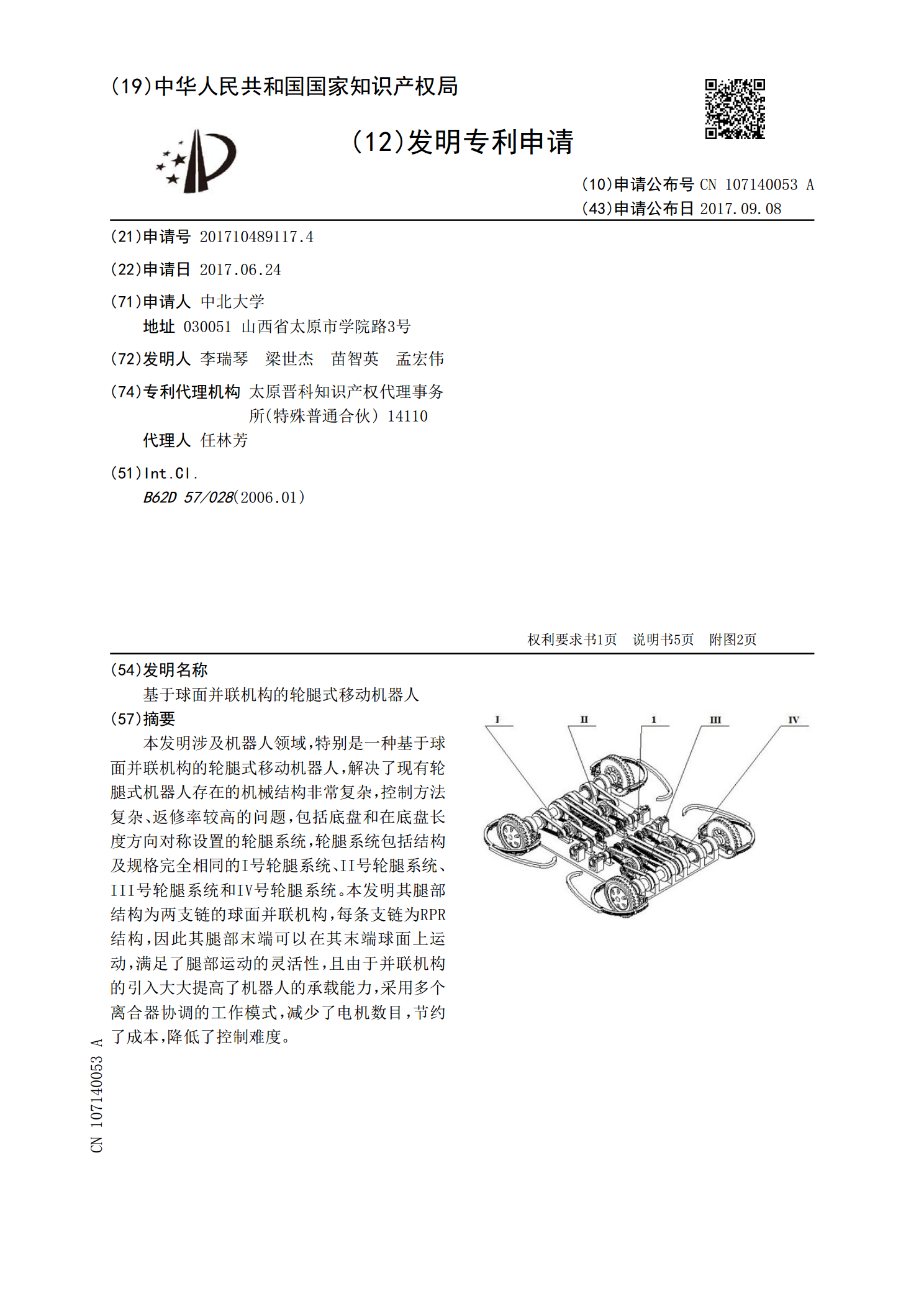
本发明涉及机器人领域,特别是一种基于球面并联机构的轮腿式移动机器人,解决了现有轮腿式机器人存在的机械结构非常复杂,控制方法复杂、返修率较高的问题,包括底盘和在底盘长度方向对称设置的轮腿系统,轮腿系统包括结构及规格完全相同的I号轮腿系统、II号轮腿系统、III号轮腿系统和IV号轮腿系统。本发明其腿部结构为两支链的球面并联机构,每条支链为RPR结构,因此其腿部末端可以在其末端球面上运动,满足了腿部运动的灵活性,且由于并联机构的引入大大提高了机器人的承载能力,采用多个离合器协调的工作模式,减少了电机数目,节约了

Stewart机器人模型辨识及控制方法研究的任务书.docx
Stewart机器人模型辨识及控制方法研究的任务书一、任务背景随着机器人技术的快速发展,机器人在工业生产、服务领域和科研领域得到了越来越广泛的应用。尤其是在工业生产领域,机器人的应用已经成为提高生产效率、降低生产成本、提高产品质量的重要手段之一。机器人模型辨识及控制方法研究成为当前机器人领域研究的热点之一。Stewart机器人是六自由度并联机器人的代表,由于其具有空间可选择性、设计简单、精度高等优点,广泛应用于飞行模拟器、运动仿真、起重机械和医疗康复等领域。但是,在Stewart机器人的运动控制方面还存在