
基于迭代最近点的井下无人机实时位姿估计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于迭代最近点的井下无人机实时位姿估计.docx
基于迭代最近点的井下无人机实时位姿估计标题:基于迭代最近点的井下无人机实时位姿估计摘要:井下无人机的实时位姿估计是在复杂环境中进行自主导航和定位所必需的关键技术之一。本论文提出了一种基于迭代最近点的方法来实现井下无人机的实时位姿估计。该方法利用井下传感器获得的点云数据,并通过迭代最近点算法进行配准和优化,从而实现无人机的位姿估计。通过对该方法进行实验验证,结果表明,在不同井下环境中,该方法能够准确、快速地估计无人机的位姿,为井下无人机的自主导航奠定了基础。1.引言井下环境通常复杂多变,对无人机的自主导航和

基于深度神经网络的井下无人机视觉位姿估计.pptx
添加副标题目录PART01PART02深度神经网络的基本原理井下无人机视觉位姿估计的挑战深度神经网络在井下无人机视觉位姿估计中的优势深度神经网络在井下无人机视觉位姿估计中的实践案例PART03算法设计的基本原则算法设计的具体步骤算法设计中的关键技术算法设计的实践案例PART04训练与优化的基本原则训练与优化的具体方法训练与优化的实践案例训练与优化的效果评估PART05实际应用中的问题与挑战实际应用的效果评估实际应用的改进方案实际应用的前景展望PART06未来研究的方向与重点未来研究的难点与挑战未来研究的创

基于特征点对的位姿估计方法研究.docx
基于特征点对的位姿估计方法研究摘要位姿估计是计算机视觉中的一个重要问题,它涉及到如何确定一个物体在三维空间中的位置和方向。传统的算法需要使用反投影进行目标检测和匹配,然而这种方法耗时且易受噪声和遮挡的影响。相比之下,基于特征点对的位姿估计方法在计算复杂度和鲁棒性方面更具优势。本文将介绍基于特征点对的位姿估计方法的原理、流程和应用。首先,介绍了位姿估计的基本概念和研究背景。其次,介绍了特征点对的概念和特征匹配算法。然后,重点介绍基于特征点对的位姿估计算法,包括最小重投影误差(PnP)算法和迭代最近点算法(I
基于深度学习的迭代6D位姿估计方法及装置.pdf
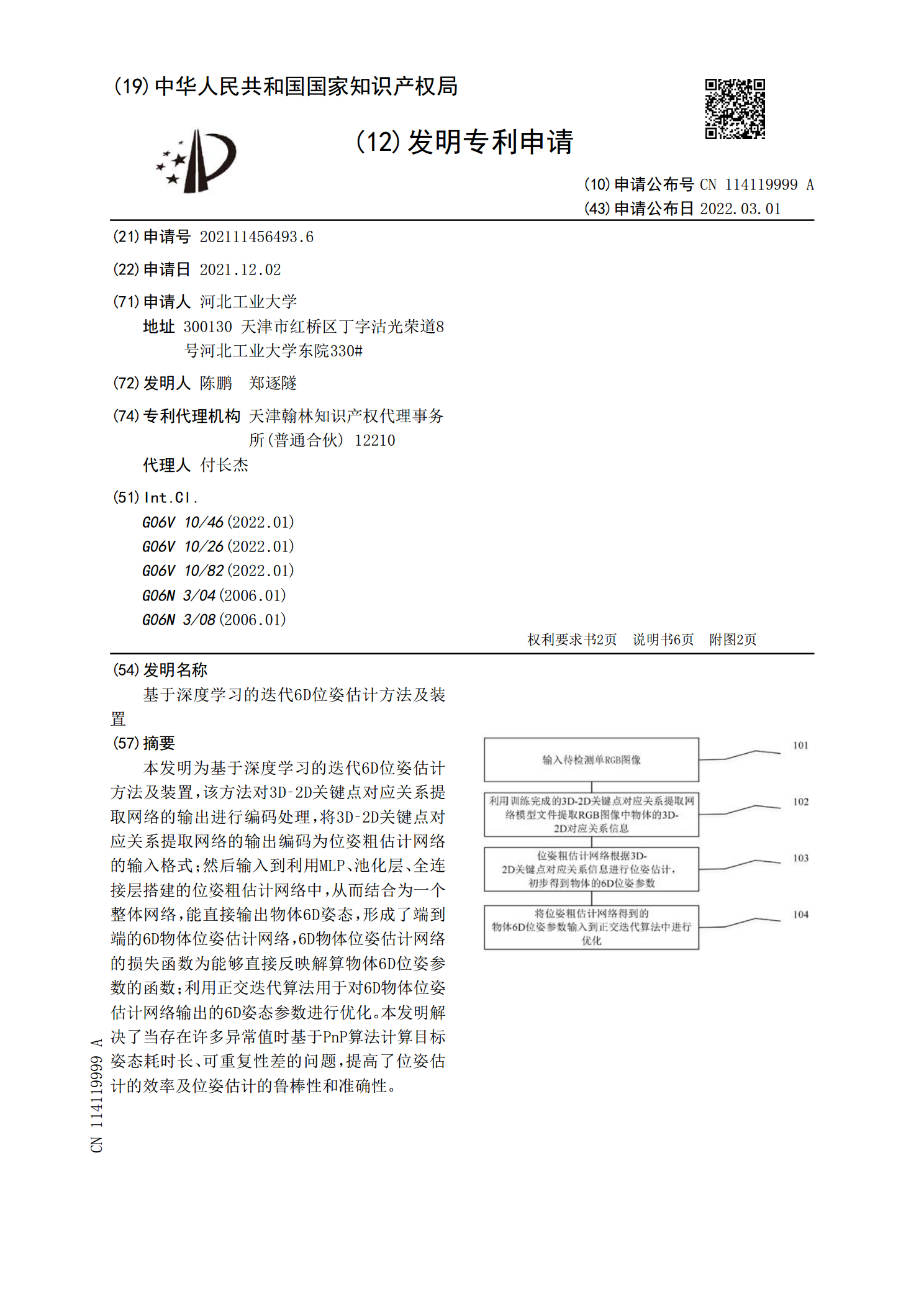
本发明为基于深度学习的迭代6D位姿估计方法及装置,该方法对3D‑2D关键点对应关系提取网络的输出进行编码处理,将3D‑2D关键点对应关系提取网络的输出编码为位姿粗估计网络的输入格式;然后输入到利用MLP、池化层、全连接层搭建的位姿粗估计网络中,从而结合为一个整体网络,能直接输出物体6D姿态,形成了端到端的6D物体位姿估计网络,6D物体位姿估计网络的损失函数为能够直接反映解算物体6D位姿参数的函数;利用正交迭代算法用于对6D物体位姿估计网络输出的6D姿态参数进行优化。本发明解决了当存在许多异常值时基于PnP

基于激光雷达点法向量的车辆实时位姿估计.pptx
基于激光雷达点法向量的车辆实时位姿估计01添加章节标题车辆位姿估计方法车辆位姿估计的原理基于激光雷达点法向量的位姿估计方法车辆位姿估计的精度和可靠性激光雷达点法向量处理激光雷达点云数据处理点法向量的计算和优化点法向量在位姿估计中的应用车辆实时位姿估计系统设计系统架构和模块设计数据采集和处理流程实时位姿估计的实现方法系统性能评估和优化实验验证和结果分析实验场景和数据集介绍实验方法和过程实验结果分析和比较结果对位姿估计的改进和优化结论与展望基于激光雷达点法向量的车辆实时位姿估计的优缺点在实际应用中的潜在价值和