
基于主动万向轮的全向移动叉车设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于主动万向轮的全向移动叉车设计.docx
基于主动万向轮的全向移动叉车设计基于主动万向轮的全向移动叉车设计摘要全向移动叉车是一种具有高机动性和灵活性的叉车,它可以在狭小空间内实现全向移动。本文提出了基于主动万向轮的全向移动叉车设计,通过对叉车结构和控制系统的设计,实现了叉车的全向移动能力。在本文中,首先介绍了全向移动叉车的背景和意义,然后详细阐述了基于主动万向轮的叉车设计原理和结构设计。接着,介绍了叉车的控制系统设计和实现,包括运动控制和路径规划。最后,通过实验证明了该设计的有效性和可行性。关键词:全向移动叉车、主动万向轮、结构设计、控制系统1.

基于主动万向轮的全向移动叉车设计.docx
基于主动万向轮的全向移动叉车设计一、绪论在现代仓储物流业中,叉车是一种必不可少的物料运输设备。传统的叉车通常采用单向轮和双向轮,虽然能够满足不同场景的需求,但受到快速转弯和行驶灵活掌握等因素的限制,难以达到全向移动的要求。随着科技的不断发展,主动万向轮技术的出现为叉车的全向移动提供了新的解决方案。本文将探讨基于主动万向轮的全向移动叉车的设计方案。二、主动万向轮的基本原理和特点主动万向轮是一种可以实现全向运动的轮子。相比于普通的单向轮或双向轮,主动万向轮具有更加灵活的转向能力。主动万向轮通常由一个驱动器驱动
全向叉车AGV中基于舵轮与主动万向轮组合的底盘.pdf
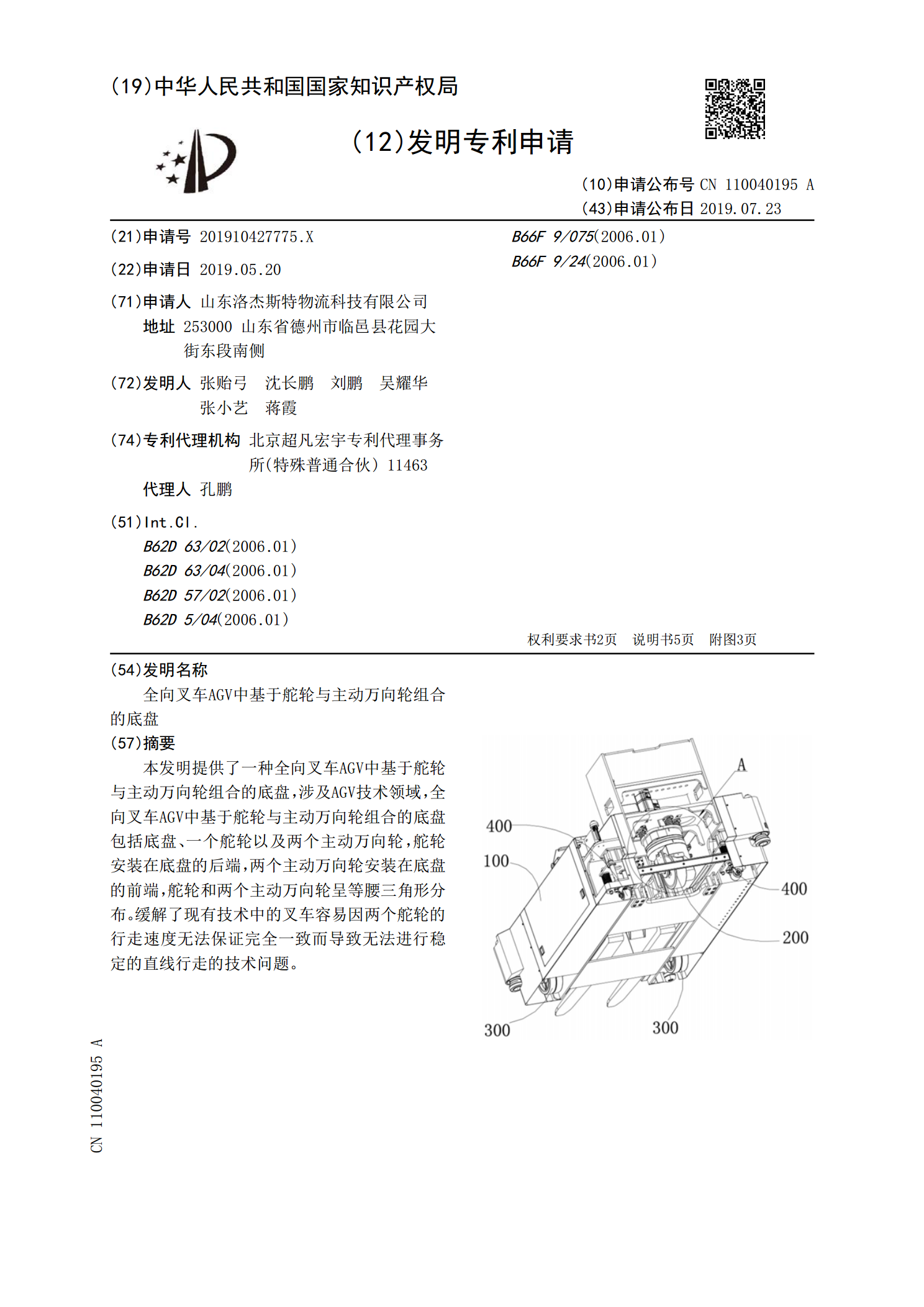
本发明提供了一种全向叉车AGV中基于舵轮与主动万向轮组合的底盘,涉及AGV技术领域,全向叉车AGV中基于舵轮与主动万向轮组合的底盘包括底盘、一个舵轮以及两个主动万向轮,舵轮安装在底盘的后端,两个主动万向轮安装在底盘的前端,舵轮和两个主动万向轮呈等腰三角形分布。缓解了现有技术中的叉车容易因两个舵轮的行走速度无法保证完全一致而导致无法进行稳定的直线行走的技术问题。

基于推杆电机的全向移动多功能叉车的设计.docx
基于推杆电机的全向移动多功能叉车的设计摘要:随着工业化的不断发展,叉车作为搬运物品的装置逐渐引起人们的关注。本文基于推杆电机设计一种全向移动多功能叉车,该叉车可以实现前进、后退、横向行驶和旋转等方向的移动,并配有多种功能模块,可用于不同工作场合。本文首先介绍了叉车的发展历史和现状,然后详细描述了所设计的叉车的结构和原理,包括主体结构和控制系统的组成。最后进行了实验验证,证明该叉车具有较好的运动性能和功能实用性。关键词:推杆电机;全向移动;多功能叉车;控制系统一、引言叉车是一种用于搬运货物和物料的装置,可以

一种全向移动叉车.pdf
本发明公开了一种全向移动叉车,包括有车架、车轮、转向系统、中央控制器,车架上设有驾驶座、驾驶座扶手,位于驾驶座下还设有一个箱体,车轮为螺旋滚轮式车轮,每个车轮由独立的电机驱动,转向系统包括有电机、电机控制器、操纵手柄,操纵手柄安装于驾驶座扶手上,操纵手柄连接中央控制器,中央控制器连接电机控制器,所述电机控制器、电机、车轮依次连接,电机与车轮之间还安装有减速器,减速器与车轮同轴安装,电机成对布置于箱体内,减速器对称布置于箱体的两侧,箱体的前、后两端面上分别固定安装有支架、支撑轴、减震块。本发明的结构简单,故