
基于改进遗传优化算法的线阵相机标定方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于改进遗传优化算法的线阵相机标定方法.docx
基于改进遗传优化算法的线阵相机标定方法标题:基于改进遗传优化算法的线阵相机标定方法摘要:线阵相机标定是计算机视觉领域中的重要问题,对于实现高精度的三维重构和测量具有重要意义。传统的相机标定方法通常采用基于特征点的方法,但存在计算量大、精度低等问题。本文提出了一种基于改进遗传优化算法的线阵相机标定方法,旨在提高标定精度和速度。首先,对线阵相机进行外部参数的标定,然后通过内部参数的标定,最终得到系统的完整标定结果。实验证明,本文提出的方法能够有效地提高线阵相机的标定精度和速度。1.引言随着计算机视觉技术和三维
线阵相机标定方法.pdf
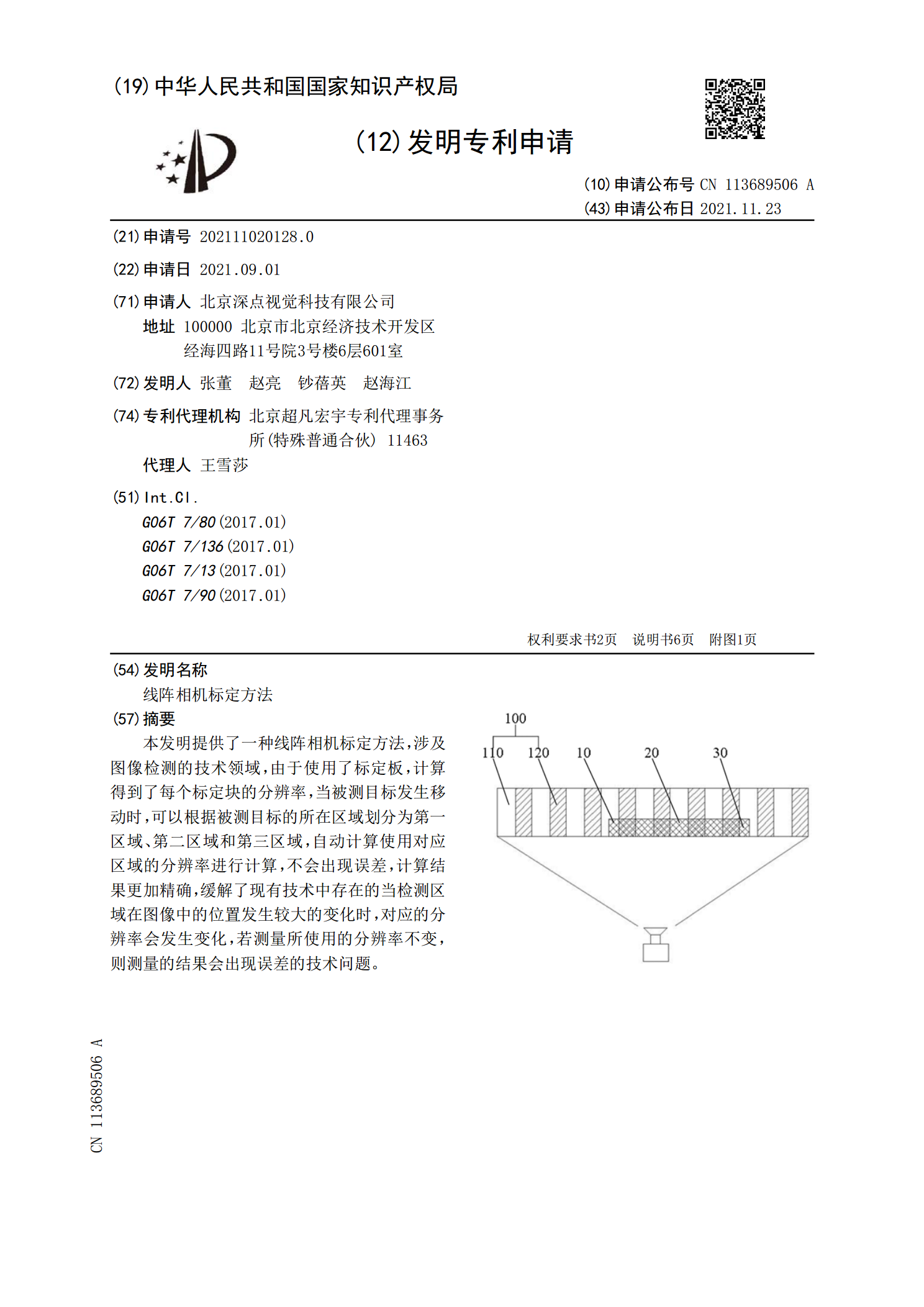
本发明提供了一种线阵相机标定方法,涉及图像检测的技术领域,由于使用了标定板,计算得到了每个标定块的分辨率,当被测目标发生移动时,可以根据被测目标的所在区域划分为第一区域、第二区域和第三区域,自动计算使用对应区域的分辨率进行计算,不会出现误差,计算结果更加精确,缓解了现有技术中存在的当检测区域在图像中的位置发生较大的变化时,对应的分辨率会发生变化,若测量所使用的分辨率不变,则测量的结果会出现误差的技术问题。

采用改进遗传算法优化神经网络的双目相机标定.docx
采用改进遗传算法优化神经网络的双目相机标定标题:采用改进遗传算法优化神经网络的双目相机标定摘要:双目相机标定是计算机视觉领域的重要问题,它对于实现立体视觉、深度感知和三维重建等任务至关重要。然而,传统的双目相机标定方法在标定误差和计算效率等方面存在一定的局限性。为了提高双目相机标定的准确性和效率,本论文提出了一种采用改进遗传算法优化神经网络的双目相机标定方法。1.引言双目相机标定是确定两个摄像头之间的相对关系,以实现三维场景的精确重建。传统的双目相机标定方法,如基于棋盘格的标定方法,依赖于人工提供数据,容

基于改进遗传算法的单目相机标定和目标定位的研究.docx
基于改进遗传算法的单目相机标定和目标定位的研究基于改进遗传算法的单目相机标定和目标定位的研究摘要:随着计算机视觉技术的发展,单目相机标定和目标定位在许多应用中得到了广泛的应用。然而,传统的标定和定位方法存在计算复杂性高以及精度低等问题。为了克服这些问题,本文提出了一种基于改进遗传算法的单目相机标定和目标定位方法。该方法通过引入优化算法来对相机参数进行校准,通过改进遗传算法来实现目标定位。实验结果表明,所提出的方法在标定和定位精度上明显优于传统方法。关键词:单目相机、标定、目标定位、改进遗传算法1.引言单目
基于激光扫描仪标定线阵相机的系统及方法.pdf
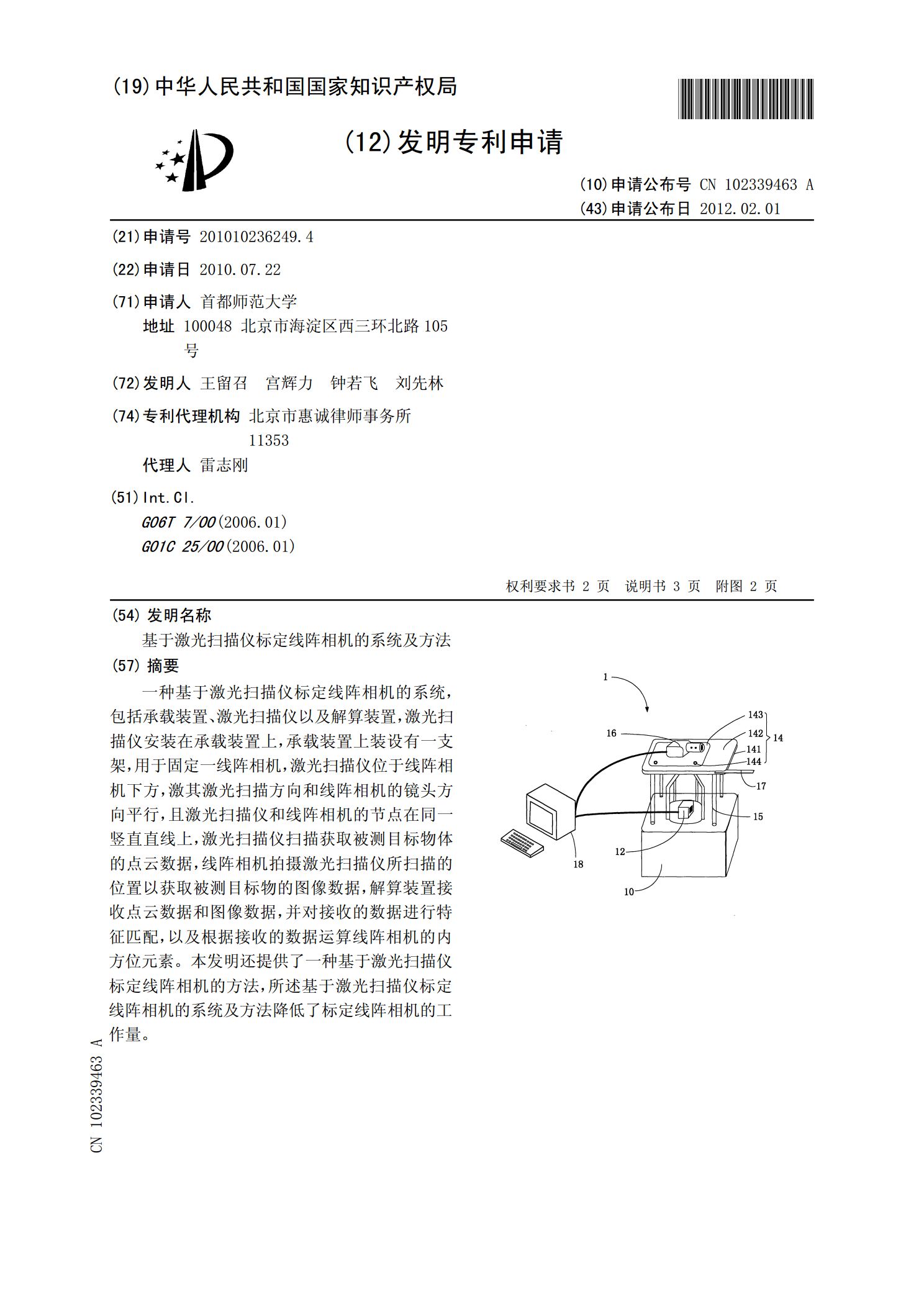
一种基于激光扫描仪标定线阵相机的系统,包括承载装置、激光扫描仪以及解算装置,激光扫描仪安装在承载装置上,承载装置上装设有一支架,用于固定一线阵相机,激光扫描仪位于线阵相机下方,激其激光扫描方向和线阵相机的镜头方向平行,且激光扫描仪和线阵相机的节点在同一竖直直线上,激光扫描仪扫描获取被测目标物体的点云数据,线阵相机拍摄激光扫描仪所扫描的位置以获取被测目标物的图像数据,解算装置接收点云数据和图像数据,并对接收的数据进行特征匹配,以及根据接收的数据运算线阵相机的内方位元素。本发明还提供了一种基于激光扫描仪标定线