
线阵相机标定方法.pdf

书生****aa

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
线阵相机标定方法.pdf
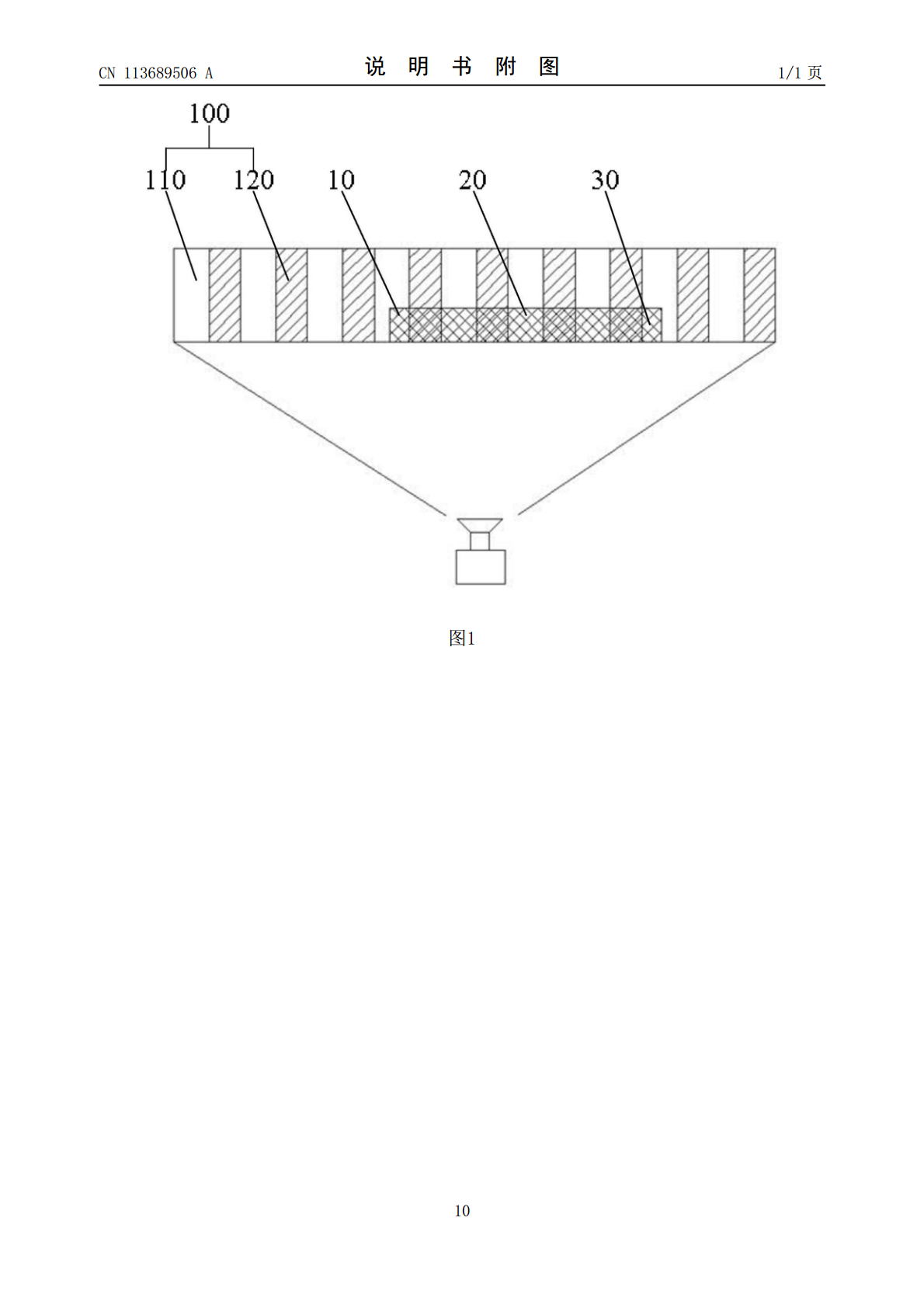
本发明提供了一种线阵相机标定方法,涉及图像检测的技术领域,由于使用了标定板,计算得到了每个标定块的分辨率,当被测目标发生移动时,可以根据被测目标的所在区域划分为第一区域、第二区域和第三区域,自动计算使用对应区域的分辨率进行计算,不会出现误差,计算结果更加精确,缓解了现有技术中存在的当检测区域在图像中的位置发生较大的变化时,对应的分辨率会发生变化,若测量所使用的分辨率不变,则测量的结果会出现误差的技术问题。

基于改进遗传优化算法的线阵相机标定方法.docx
基于改进遗传优化算法的线阵相机标定方法标题:基于改进遗传优化算法的线阵相机标定方法摘要:线阵相机标定是计算机视觉领域中的重要问题,对于实现高精度的三维重构和测量具有重要意义。传统的相机标定方法通常采用基于特征点的方法,但存在计算量大、精度低等问题。本文提出了一种基于改进遗传优化算法的线阵相机标定方法,旨在提高标定精度和速度。首先,对线阵相机进行外部参数的标定,然后通过内部参数的标定,最终得到系统的完整标定结果。实验证明,本文提出的方法能够有效地提高线阵相机的标定精度和速度。1.引言随着计算机视觉技术和三维

一种线阵相机镜头畸变的标定方法.docx
一种线阵相机镜头畸变的标定方法导言线阵相机是一种常见的工业检测设备,但是由于镜头的畸变等问题,常常会影响到检测的准确性。因此,对线阵相机镜头的畸变进行标定是非常必要的。本文将介绍一种线阵相机镜头畸变的标定方法。一、畸变的形成原因在线阵相机的成像过程中,图像经过镜头的折射和反射,最终呈现在图像传感器上。但是,由于我们的镜头是不完美的,会产生多种畸变,例如桶形畸变、枕形畸变等等。这些畸变对于我们的成像有着非常大的影响。原因是由于真实世界中的物体和图像传感器之间的距离并不相等,这就会导致镜头成像时需要对图像进行
基于激光扫描仪标定线阵相机的系统及方法.pdf
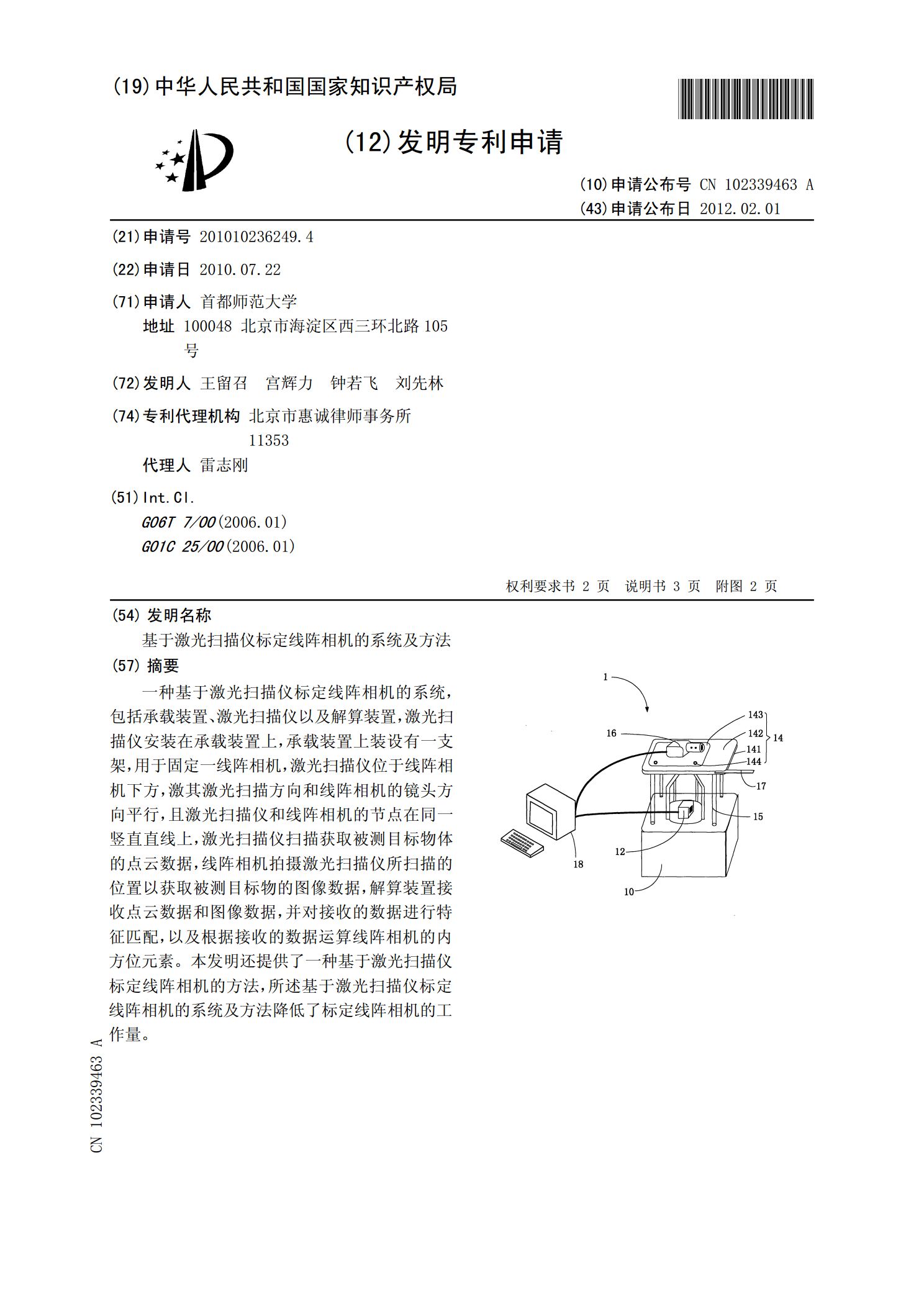
一种基于激光扫描仪标定线阵相机的系统,包括承载装置、激光扫描仪以及解算装置,激光扫描仪安装在承载装置上,承载装置上装设有一支架,用于固定一线阵相机,激光扫描仪位于线阵相机下方,激其激光扫描方向和线阵相机的镜头方向平行,且激光扫描仪和线阵相机的节点在同一竖直直线上,激光扫描仪扫描获取被测目标物体的点云数据,线阵相机拍摄激光扫描仪所扫描的位置以获取被测目标物的图像数据,解算装置接收点云数据和图像数据,并对接收的数据进行特征匹配,以及根据接收的数据运算线阵相机的内方位元素。本发明还提供了一种基于激光扫描仪标定线

基于投影变换的线阵旋转扫描相机标定方法.docx
基于投影变换的线阵旋转扫描相机标定方法基于投影变换的线阵旋转扫描相机标定方法摘要:线阵旋转扫描相机是一种常用于工业检测和三维测量的非接触式相机,精确的标定是确保其测量精度的关键。本文提出了一种基于投影变换的线阵旋转扫描相机标定方法。该方法通过利用线阵相机在不同旋转角度下观测到的校准板平面上的投影特征,计算出相机内外参数,从而实现相机的准确标定。实验证明,该方法能够有效地提高线阵旋转扫描相机的标定精度。关键词:线阵旋转扫描相机,标定,投影变换,内外参数1.引言线阵旋转扫描相机是一种通过旋转扫描来获取三维信息