
基于激光定位的机器人加工轨迹规划.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于激光定位的机器人加工轨迹规划.docx
基于激光定位的机器人加工轨迹规划基于激光定位的机器人加工轨迹规划摘要随着机器人技术的快速发展,机器人在工业生产中的应用越来越广泛。机器人加工是其中一个重要的应用领域,而加工轨迹规划在机器人加工过程中具有关键作用。本论文基于激光定位技术,研究了机器人加工轨迹规划的方法和应用。首先介绍了激光定位的原理和特点,然后探讨了机器人加工中的轨迹规划问题,并提出了一种基于激光定位的加工轨迹规划算法。最后进行了实验验证,结果表明该算法能够有效地规划出适合加工任务的轨迹。关键词:机器人加工、轨迹规划、激光定位、算法1.引言

基于PC的多轨迹生成激光加工系统的设计.docx
基于PC的多轨迹生成激光加工系统的设计基于PC的多轨迹生成激光加工系统的设计摘要:随着激光加工技术的快速发展,越来越多的领域开始采用激光加工技术进行材料加工和表面处理。本论文以PC作为控制中心,设计了一种基于PC的多轨迹生成激光加工系统。系统通过接收PC发送的指令,控制激光头的运动轨迹,实现对工件的精确加工。通过建立工作模型和激光参数的优化,可以获得高质量的加工效果。本系统不仅具有较高的加工精度和稳定性,还能实现多种复杂形状的加工,具有较强的实用性和推广价值。关键词:激光加工;PC控制;多轨迹生成;加工精
基于激光加工机台的标靶定位方法、装置和激光加工机台.pdf
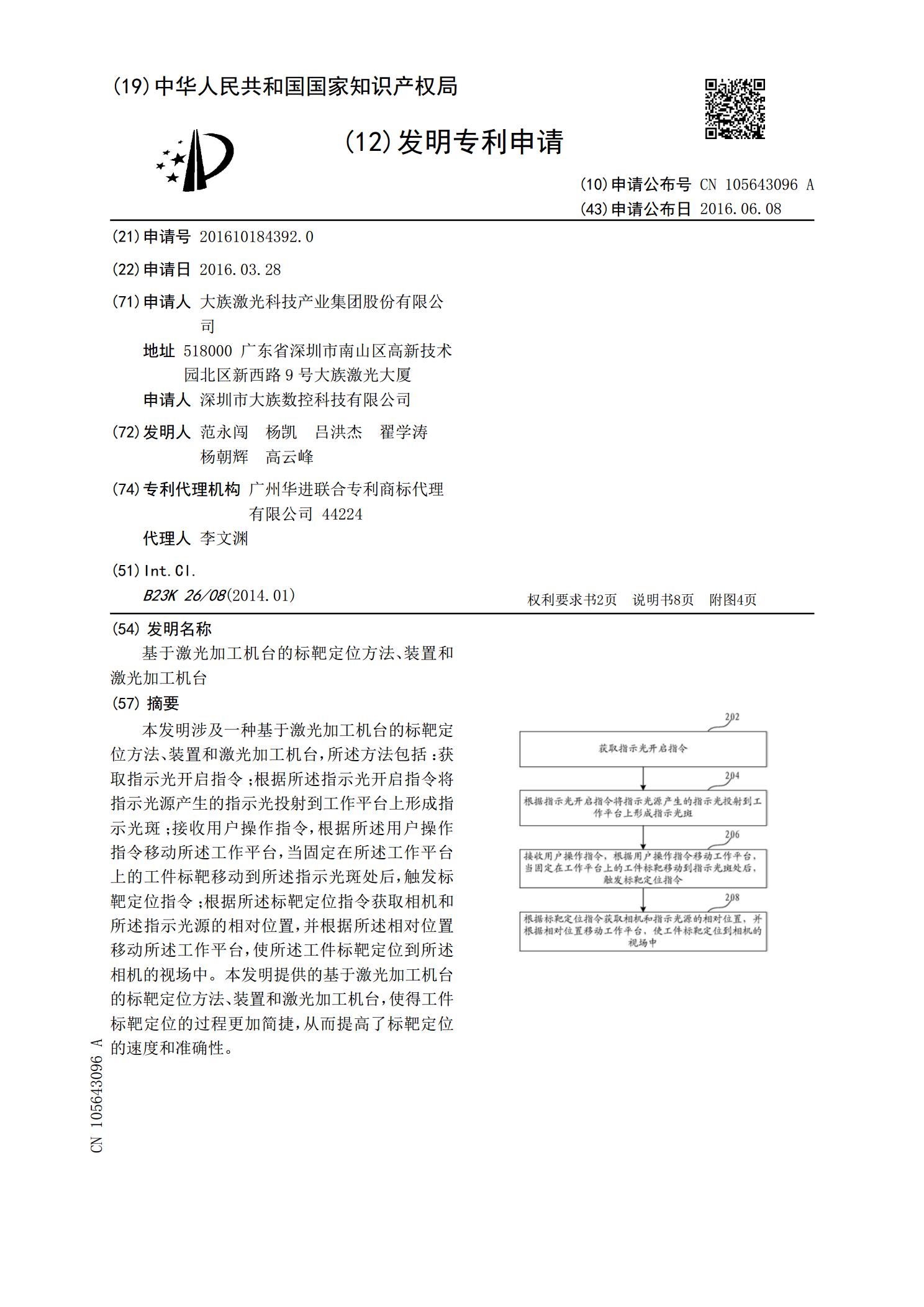
本发明涉及一种基于激光加工机台的标靶定位方法、装置和激光加工机台,所述方法包括:获取指示光开启指令;根据所述指示光开启指令将指示光源产生的指示光投射到工作平台上形成指示光斑;接收用户操作指令,根据所述用户操作指令移动所述工作平台,当固定在所述工作平台上的工件标靶移动到所述指示光斑处后,触发标靶定位指令;根据所述标靶定位指令获取相机和所述指示光源的相对位置,并根据所述相对位置移动所述工作平台,使所述工件标靶定位到所述相机的视场中。本发明提供的基于激光加工机台的标靶定位方法、装置和激光加工机台,使得工件标靶定

基于激光测量的机器人智能定位系统.pptx
基于激光测量的机器人智能定位系统目录添加章节标题系统概述定义与功能工作原理系统组成激光测量技术激光测距原理激光雷达系统测量精度与误差分析机器人智能定位技术SLAM技术机器学习与定位精度传感器融合技术系统应用场景与优势工业自动化智能物流无人驾驶汽车安全监控与救援系统实现与案例分析系统硬件配置软件算法实现实际应用案例案例分析结果与优化建议未来发展与挑战技术发展趋势面临的挑战与解决方案未来应用前景与市场机遇THANKYOU

基于激光跟踪测量的机器人定位研究.docx
基于激光跟踪测量的机器人定位研究基于激光跟踪测量的机器人定位研究摘要:机器人定位是现代机器人技术中的重要研究内容之一。激光跟踪测量作为一种精确定位机器人位置的方法,现在已经广泛应用于机器人导航和自主定位领域。本论文通过对激光跟踪测量技术的综述和实验验证,探讨了基于激光跟踪测量的机器人定位方法的原理、算法和应用,并对其优缺点进行了分析和讨论。关键词:机器人定位,激光跟踪测量,定位精度,定位算法1.引言机器人定位在现代机器人技术中起着至关重要的作用。准确的机器人定位可以使机器人在复杂的环境中进行精确定位、导航