
基于LiDAR感知增强的车辆避撞方法研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于LiDAR感知增强的车辆避撞方法研究.docx
基于LiDAR感知增强的车辆避撞方法研究基于LiDAR感知增强的车辆避撞方法研究摘要:随着交通事故的频繁发生,提高车辆的安全性能成为一个迫切的需求。在车辆避撞系统中,感知模块的准确性和实时性对于预测和避免碰撞至关重要。本论文针对这一问题,提出了一种基于LiDAR感知增强的车辆避撞方法。通过利用LiDAR技术获取车辆周围环境的高精度点云数据,并通过聚类和目标分割算法进行目标识别和跟踪,实现了对周围车辆的精确感知。通过将感知模块与车辆控制系统进行无线通信,实时传输感知结果,从而实现车辆的自动避撞。实验结果表明
车辆避撞系统及方法.pdf
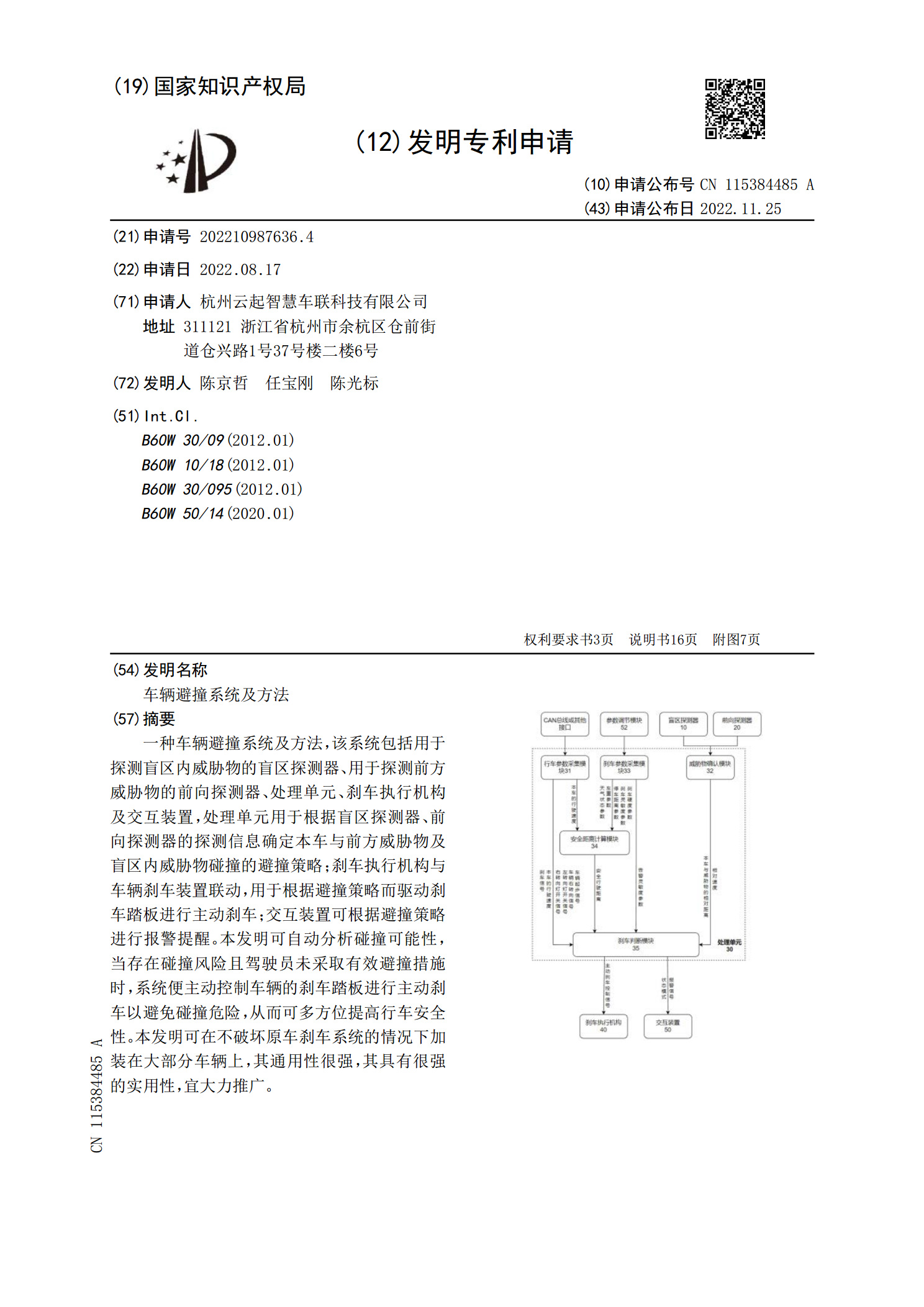
一种车辆避撞系统及方法,该系统包括用于探测盲区内威胁物的盲区探测器、用于探测前方威胁物的前向探测器、处理单元、刹车执行机构及交互装置,处理单元用于根据盲区探测器、前向探测器的探测信息确定本车与前方威胁物及盲区内威胁物碰撞的避撞策略;刹车执行机构与车辆刹车装置联动,用于根据避撞策略而驱动刹车踏板进行主动刹车;交互装置可根据避撞策略进行报警提醒。本发明可自动分析碰撞可能性,当存在碰撞风险且驾驶员未采取有效避撞措施时,系统便主动控制车辆的刹车踏板进行主动刹车以避免碰撞危险,从而可多方位提高行车安全性。本发明可在

基于场论的汽车避撞方法研究.pptx
基于场论的汽车避撞方法研究目录研究背景汽车避撞技术的必要性现有避撞技术的局限性基于场论的汽车避撞方法的提出场论的基本原理场论的基本概念车辆周围场的影响因素场论在汽车避撞中的应用基于场论的汽车避撞方法基于场论的避撞算法设计算法实现与验证与传统避撞方法的比较分析避撞方法的性能评估评估指标的确定评估实验的设计与实施实验结果分析实际应用与展望基于场论的汽车避撞方法在实际中的应用未来研究方向与展望结论研究成果总结对未来研究的建议感谢观看

基于前车轨迹预测的智能车辆高速主动避撞方法.docx
基于前车轨迹预测的智能车辆高速主动避撞方法目录一、内容概览................................................21.1背景与意义...........................................31.2国内外研究现状.......................................41.3研究内容与方法.......................................5二、相关理论基础.................

基于车辆前方目标运动模型的主动避撞系统的研究.docx
基于车辆前方目标运动模型的主动避撞系统的研究Title:ResearchonActiveCollisionAvoidanceSystembasedonVehicleForwardTargetMotionModels1.Introduction(Approximately200words)Theincreasingnumberofvehiclesonroadshasledtoariseinthefrequencyofaccidents,highlightingtheneedforadvancedtechno