
车辆避撞系统及方法.pdf

傲丝****账号


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆避撞系统及方法.pdf
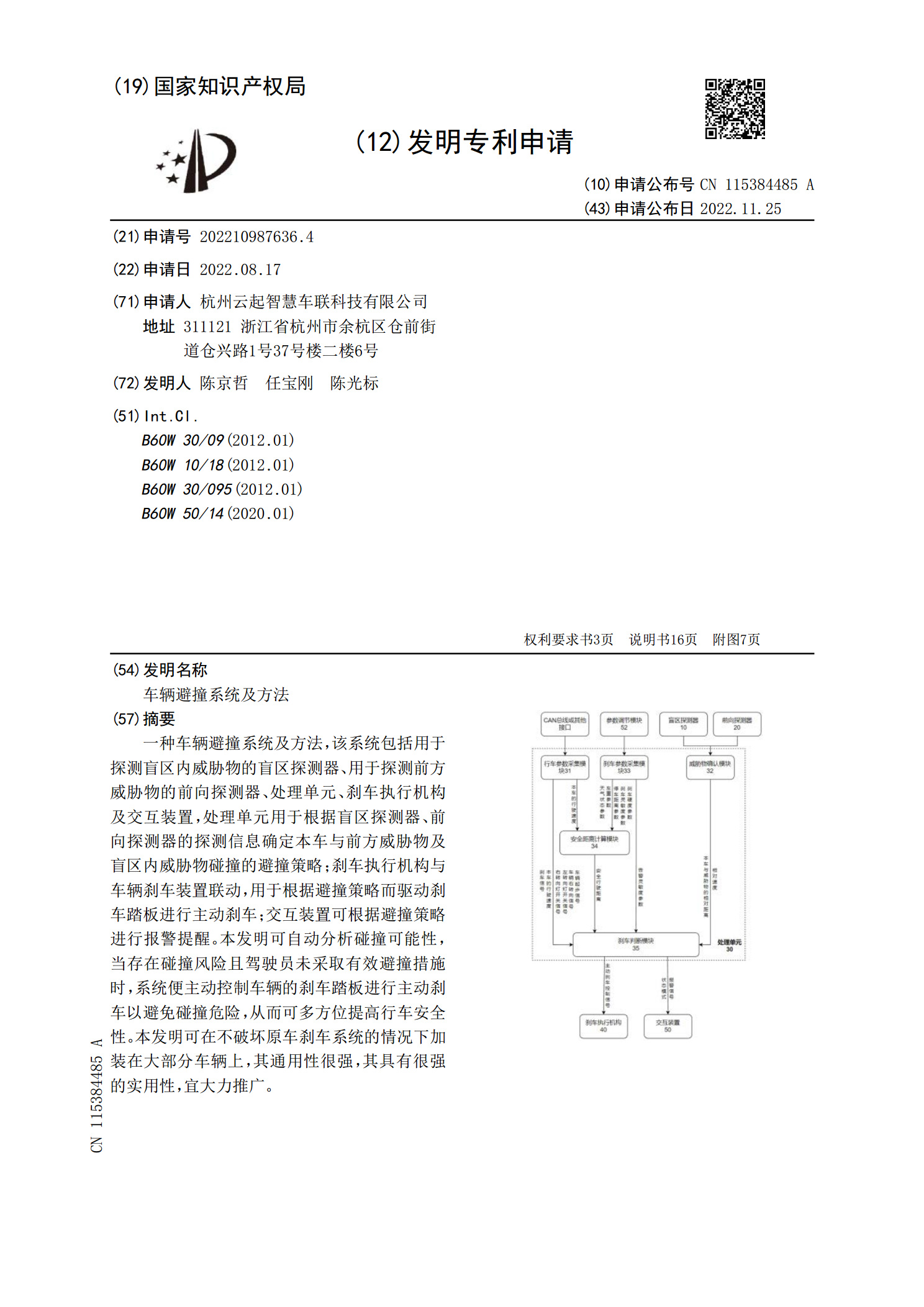
一种车辆避撞系统及方法,该系统包括用于探测盲区内威胁物的盲区探测器、用于探测前方威胁物的前向探测器、处理单元、刹车执行机构及交互装置,处理单元用于根据盲区探测器、前向探测器的探测信息确定本车与前方威胁物及盲区内威胁物碰撞的避撞策略;刹车执行机构与车辆刹车装置联动,用于根据避撞策略而驱动刹车踏板进行主动刹车;交互装置可根据避撞策略进行报警提醒。本发明可自动分析碰撞可能性,当存在碰撞风险且驾驶员未采取有效避撞措施时,系统便主动控制车辆的刹车踏板进行主动刹车以避免碰撞危险,从而可多方位提高行车安全性。本发明可在

一种车辆自主避撞系统.pdf
本发明公开了一种车辆自主避撞系统,包括传感机构、控制机构、执行机构,所述的传感机构用于采集车辆参数并送入至控制机构,所述的控制机构根据接收的车辆数据判断车辆的碰撞风险并控制执行机构,所述的执行机构执行避撞操作。本发明的优点在于:根据车辆行驶数据和前后车距离提前判断碰撞风险,并及时给出报警信息,而且根据预设的避撞策略,控制制动系统制动油压,以控制车速,减少驾驶员疏忽或者经验不足造成的碰撞风事故。

基于LiDAR感知增强的车辆避撞方法研究.docx
基于LiDAR感知增强的车辆避撞方法研究基于LiDAR感知增强的车辆避撞方法研究摘要:随着交通事故的频繁发生,提高车辆的安全性能成为一个迫切的需求。在车辆避撞系统中,感知模块的准确性和实时性对于预测和避免碰撞至关重要。本论文针对这一问题,提出了一种基于LiDAR感知增强的车辆避撞方法。通过利用LiDAR技术获取车辆周围环境的高精度点云数据,并通过聚类和目标分割算法进行目标识别和跟踪,实现了对周围车辆的精确感知。通过将感知模块与车辆控制系统进行无线通信,实时传输感知结果,从而实现车辆的自动避撞。实验结果表明
基于车路协同的施工道路行人车辆避撞预警系统及方法.pdf
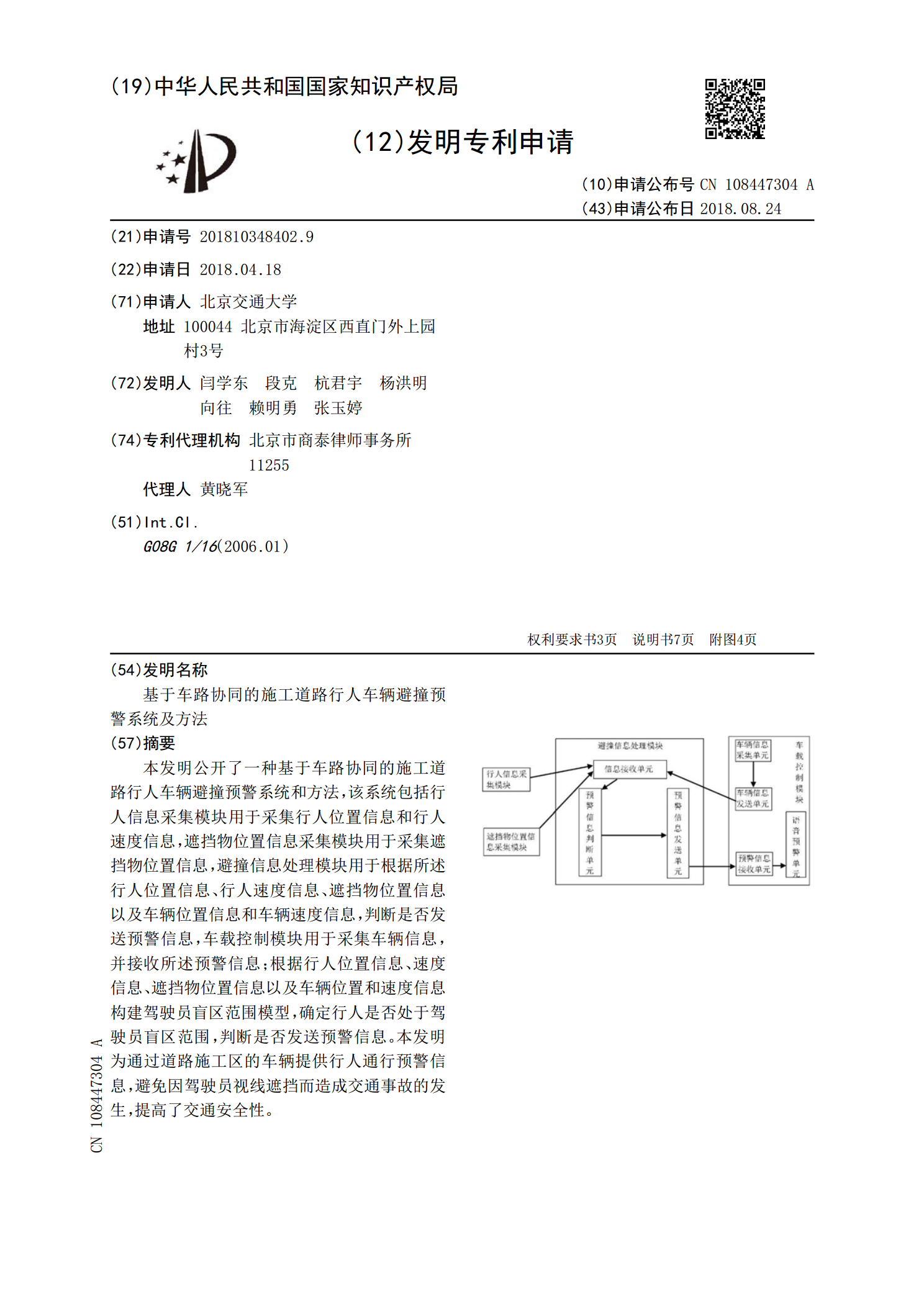
本发明公开了一种基于车路协同的施工道路行人车辆避撞预警系统和方法,该系统包括行人信息采集模块用于采集行人位置信息和行人速度信息,遮挡物位置信息采集模块用于采集遮挡物位置信息,避撞信息处理模块用于根据所述行人位置信息、行人速度信息、遮挡物位置信息以及车辆位置信息和车辆速度信息,判断是否发送预警信息,车载控制模块用于采集车辆信息,并接收所述预警信息;根据行人位置信息、速度信息、遮挡物位置信息以及车辆位置和速度信息构建驾驶员盲区范围模型,确定行人是否处于驾驶员盲区范围,判断是否发送预警信息。本发明为通过道路施工
一种车辆主动避撞路径规划方法.pdf
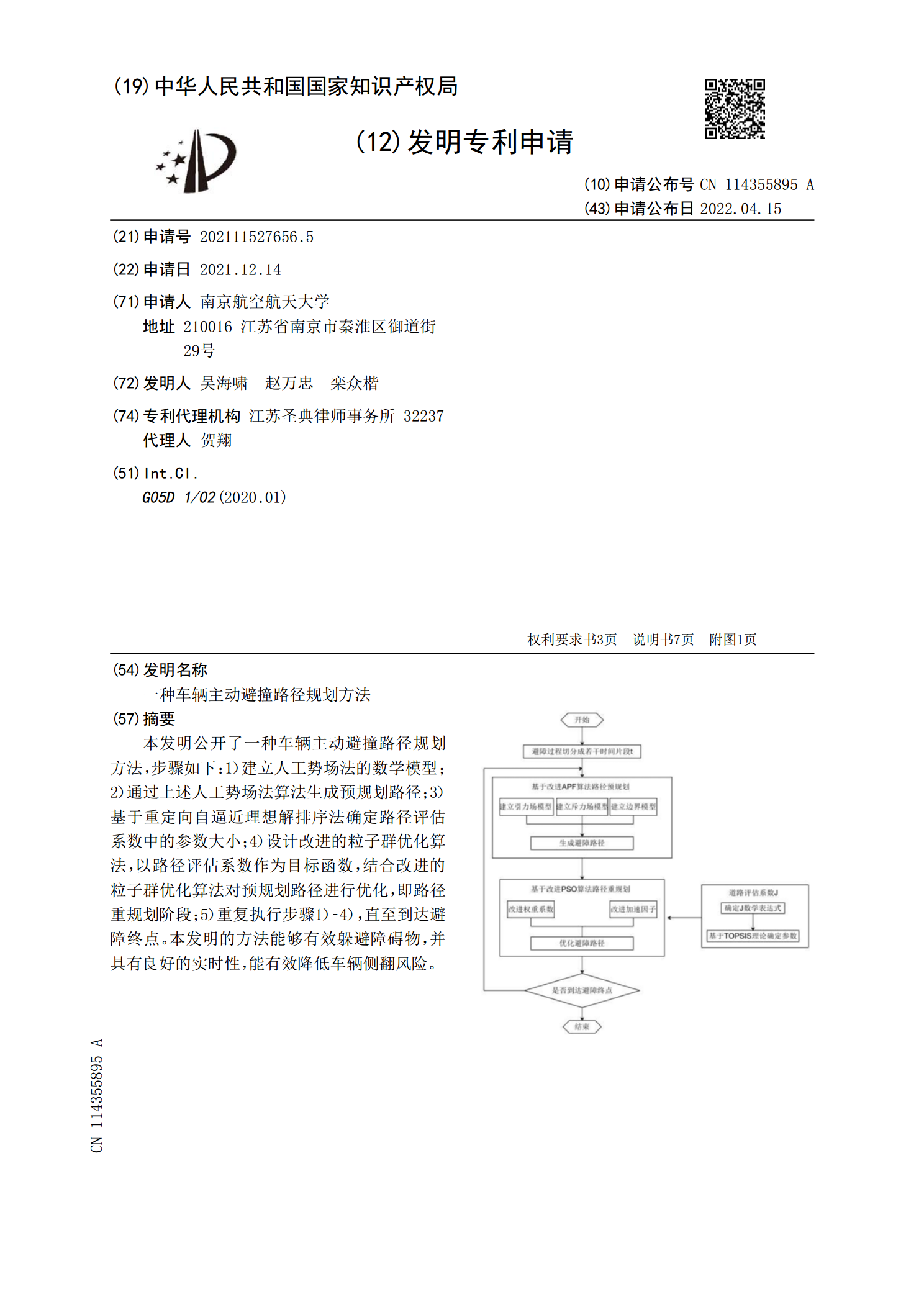
本发明公开了一种车辆主动避撞路径规划方法,步骤如下:1)建立人工势场法的数学模型;2)通过上述人工势场法算法生成预规划路径;3)基于重定向自逼近理想解排序法确定路径评估系数中的参数大小;4)设计改进的粒子群优化算法,以路径评估系数作为目标函数,结合改进的粒子群优化算法对预规划路径进行优化,即路径重规划阶段;5)重复执行步骤1)?4),直至到达避障终点。本发明的方法能够有效躲避障碍物,并具有良好的实时性,能有效降低车辆侧翻风险。