
坦克炮控系统的复合自抗扰控制研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

坦克炮控系统的复合自抗扰控制研究.docx
坦克炮控系统的复合自抗扰控制研究摘要:坦克作为现代战争中重要的作战力量之一,其火力的准确性对于战局的胜败起着决定性的作用。然而,受到外界扰动的影响,坦克炮控系统往往会出现精度下降的情况。因此,如何提高坦克炮控系统的自抗扰能力成为了一个重要的研究课题。本论文以坦克炮控系统的复合自抗扰控制为题,系统地介绍了坦克炮控系统的基本原理、扰动来源、自抗扰控制的概念和方法等,并以某型坦克炮控系统为例进行了仿真实验,验证了复合自抗扰控制方法的有效性。关键词:坦克,炮控系统,自抗扰控制,复合控制引言:在现代战争中,坦克作为

坦克炮控系统的复合自抗扰控制研究.pptx
,目录PartOnePartTwo复合自抗扰控制技术的原理复合自抗扰控制技术的特点复合自抗扰控制技术的应用范围PartThree坦克炮控系统的组成坦克炮控系统的工作原理坦克炮控系统对控制精度的要求PartFour复合自抗扰控制在坦克炮控系统中的实现方式复合自抗扰控制在坦克炮控系统中的优势复合自抗扰控制在坦克炮控系统中的控制效果PartFive仿真模型的建立仿真实验结果分析仿真结果与实际应用的对比分析PartSix实际应用情况介绍实际应用效果评估实际应用中存在的问题与解决方案PartSeven研究结论研究展

基于自抗扰空制技术的某坦克炮控系统应用研究的中期报告.docx
基于自抗扰空制技术的某坦克炮控系统应用研究的中期报告中期报告一、研究背景某型号坦克的火控系统是坦克的核心部件,其稳定性和准确性直接影响着坦克的战斗力和生存能力。针对目前坦克炮控系统的问题,本研究基于自抗扰空制技术,致力于实现对坦克炮控系统的强自适应、高精度控制和强干扰抑制。二、研究内容1.对坦克炮控系统进行建模,确定控制器的结构和参数;2.设计基于自抗扰空制技术的控制器;3.进行仿真实验,测试控制器在不同情况下的强自适应和干扰抑制能力;4.验证控制器性能,与传统PID控制器对比。三、研究进展1.成功建立了

复合控制在坦克炮控系统中的应用.docx
复合控制在坦克炮控系统中的应用标题:复合控制在坦克炮控系统中的应用摘要:复合控制(HybridControl)是指将多种不同类型的控制方法结合起来,以获得更好的系统性能和更高的鲁棒性。本论文将探讨复合控制在坦克炮控系统中的应用,并对其优势进行分析。首先,我们将介绍坦克炮控系统中的常见问题和挑战,然后讨论复合控制方法的原理和特点。接下来,我们将探讨不同类型的控制方法在坦克炮控系统中的应用,并对其优势和局限性进行详细阐述。最后,我们将总结复合控制在坦克炮控系统中的应用价值,并展望未来的发展方向。关键词:复合控
自抗扰复合振动控制系统.pdf
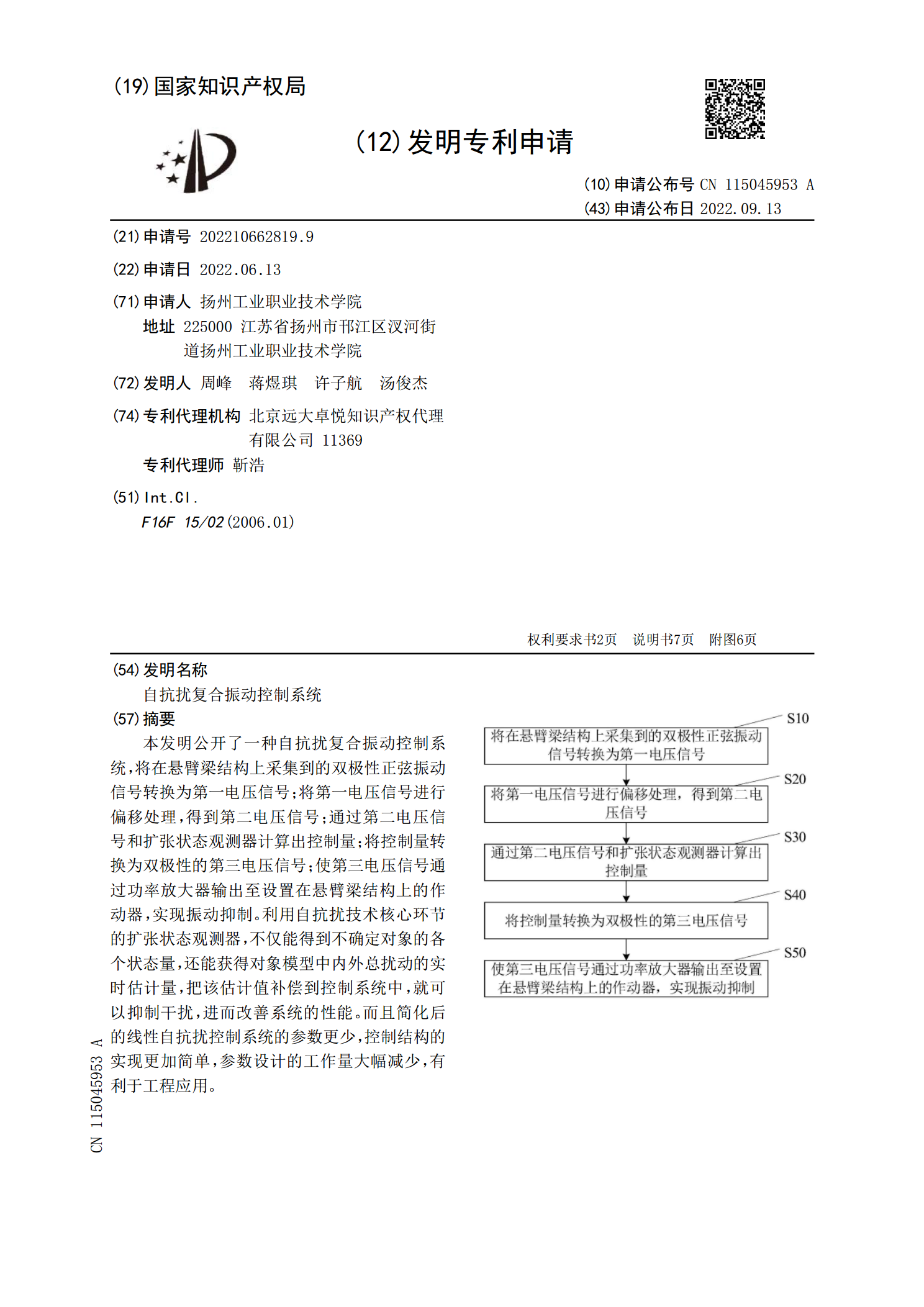
本发明公开了一种自抗扰复合振动控制系统,将在悬臂梁结构上采集到的双极性正弦振动信号转换为第一电压信号;将第一电压信号进行偏移处理,得到第二电压信号;通过第二电压信号和扩张状态观测器计算出控制量;将控制量转换为双极性的第三电压信号;使第三电压信号通过功率放大器输出至设置在悬臂梁结构上的作动器,实现振动抑制。利用自抗扰技术核心环节的扩张状态观测器,不仅能得到不确定对象的各个状态量,还能获得对象模型中内外总扰动的实时估计量,把该估计值补偿到控制系统中,就可以抑制干扰,进而改善系统的性能。而且简化后的线性自抗扰控