
可重复使用运载器复合控制研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

可重复使用运载器复合控制研究.docx
可重复使用运载器复合控制研究可重复使用运载器(RLV)是指能够多次使用的航天器,它具有很高的经济性和可靠性。在现代航天领域,RLV是一个热门的研究课题。本文将从控制方面对RLV进行研究,探讨其复合控制技术。首先,复合控制技术是一种综合利用多种控制方法的技术,可以显著提高控制系统的性能。在RLV的控制过程中,同样可以采用复合控制技术,以提升其控制性能。复合控制技术包括了模型预测控制、自适应控制、优化控制等多种控制方法。模型预测控制是一种常用的控制方法,它通过对系统未来行为的预测和优化,来生成控制指令。在RL

可重复使用运载器再入轨迹与制导控制方法综述.docx
可重复使用运载器再入轨迹与制导控制方法综述可重复使用运载器(reusablerocket)是指能够多次使用的航天器,通常用于将航天器载人或无人物资送入太空。与一次性(expendable)航天器相比,可重复使用运载器具有更高的经济效益和资源利用率。然而,可重复使用运载器的再入轨迹和制导控制方法是一个复杂的问题,涉及到多个方面的技术和工程挑战。再入轨迹是指可重复使用运载器在返回大气层并进入轨道之前所经历的飞行路径。再入轨迹的设计需要考虑多个因素,包括航天器的速度、角度和姿态等。具体来说,再入轨迹的设计应该能
可重复使用运载器再入轨迹与制导控制方法综述.pptx
汇报人:CONTENTS可重复使用运载器再入轨迹概述定义与分类国内外研究现状关键技术问题再入轨迹制导控制方法传统制导控制方法现代制导控制方法自适应制导控制方法再入轨迹优化设计基于性能优化的再入轨迹设计基于安全性的再入轨迹设计多约束条件下的再入轨迹设计再入轨迹鲁棒控制鲁棒控制基本原理再入轨迹鲁棒控制方法鲁棒控制性能评价再入轨迹自主决策与智能控制基于强化学习的再入轨迹决策基于神经网络的再入轨迹控制基于模糊逻辑的再入轨迹决策与控制可重复使用运载器再入轨迹与制导控制方法的挑战与展望面临的主要挑战未来发展方向与展望

基于补偿控制器的可重复使用运载器自适应模糊姿态控制.docx
基于补偿控制器的可重复使用运载器自适应模糊姿态控制摘要本文提出了一种基于补偿控制器的可重复使用运载器自适应模糊姿态控制方法。该方法采用了自适应模糊控制器和补偿控制器相结合的方式,以达到较好的控制效果。在仿真实验中,该方法具有较好的控制稳定性和精度,能够满足实际应用中的需求。关键词:自适应模糊控制器;补偿控制器;可重复使用运载器;姿态控制引言可重复使用运载器是一种大型的航天器,可用于多次发射和多项任务。对于这样的航天器,姿态控制是至关重要的。姿态控制技术的发展对其实用化以及安全性提出了更高的要求。模糊控制作
一种可重复使用运载器落地缓冲装置.pdf
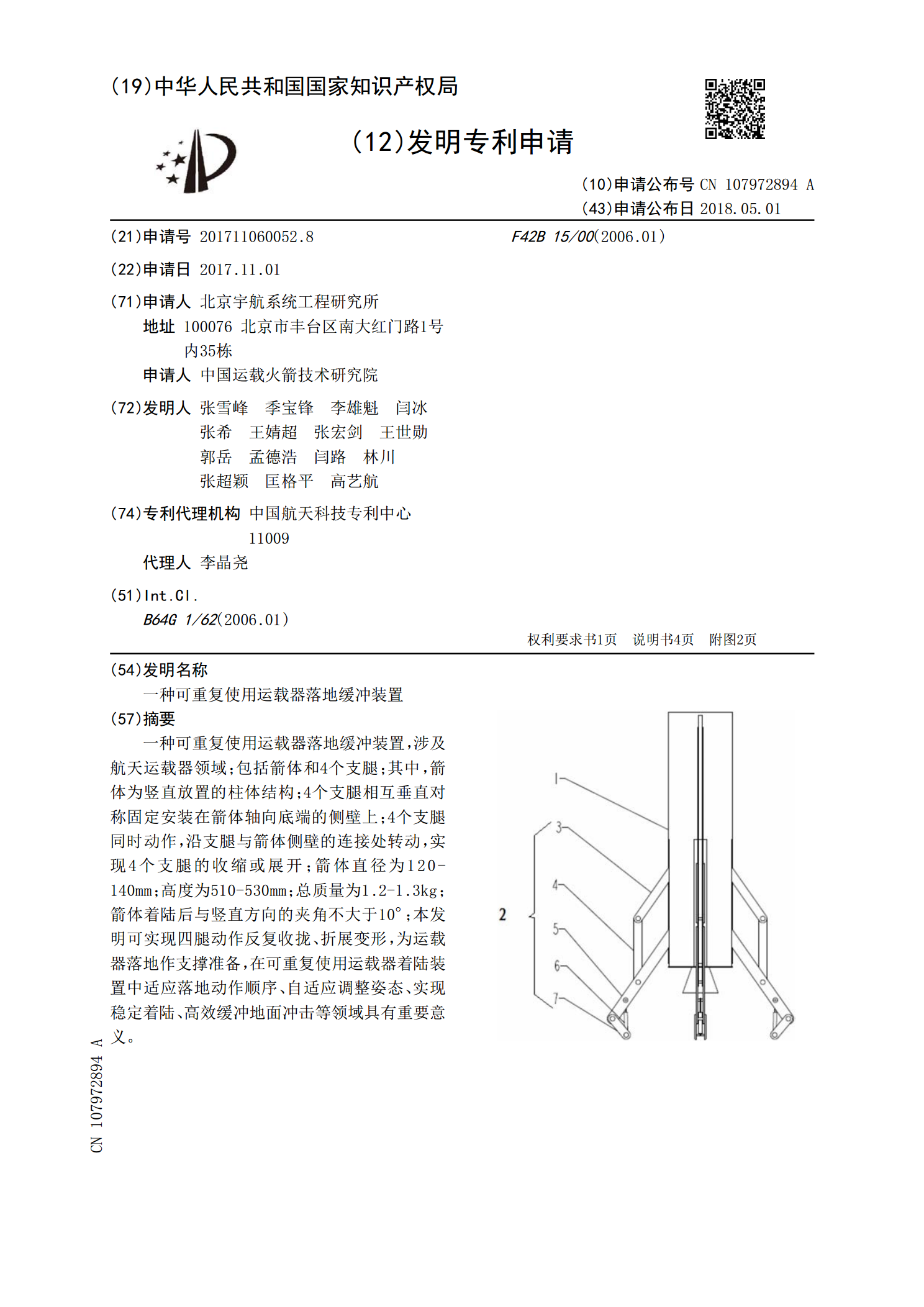
一种可重复使用运载器落地缓冲装置,涉及航天运载器领域;包括箭体和4个支腿;其中,箭体为竖直放置的柱体结构;4个支腿相互垂直对称固定安装在箭体轴向底端的侧壁上;4个支腿同时动作,沿支腿与箭体侧壁的连接处转动,实现4个支腿的收缩或展开;箭体直径为120‑140mm;高度为510‑530mm;总质量为1.2‑1.3kg;箭体着陆后与竖直方向的夹角不大于10°;本发明可实现四腿动作反复收拢、折展变形,为运载器落地作支撑准备,在可重复使用运载器着陆装置中适应落地动作顺序、自适应调整姿态、实现稳定着陆、高效缓冲地面冲