
全方位自动导引车的导航与控制系统研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

全方位自动导引车的导航与控制系统研究.docx
全方位自动导引车的导航与控制系统研究全方位自动导引车的导航与控制系统研究摘要:随着科技的不断发展,自动化技术在车辆导引与控制系统方面得到了广泛应用。全方位自动导引车的导航与控制系统是一项重要的研究课题,可以使车辆在复杂环境下实现精确的导航和控制。本论文将介绍全方位自动导引车导航与控制系统的研究现状,并分析其中的关键技术和挑战。同时,本文将探讨应用全方位自动导引车导航与控制系统的潜在领域和未来发展方向,并提出优化措施。1.引言全方位自动导引车的导航与控制系统是一种基于自动化技术的先进系统,它可以帮助车辆在各
自动导引运输车的导航方法、系统和自动导引运输车.pdf
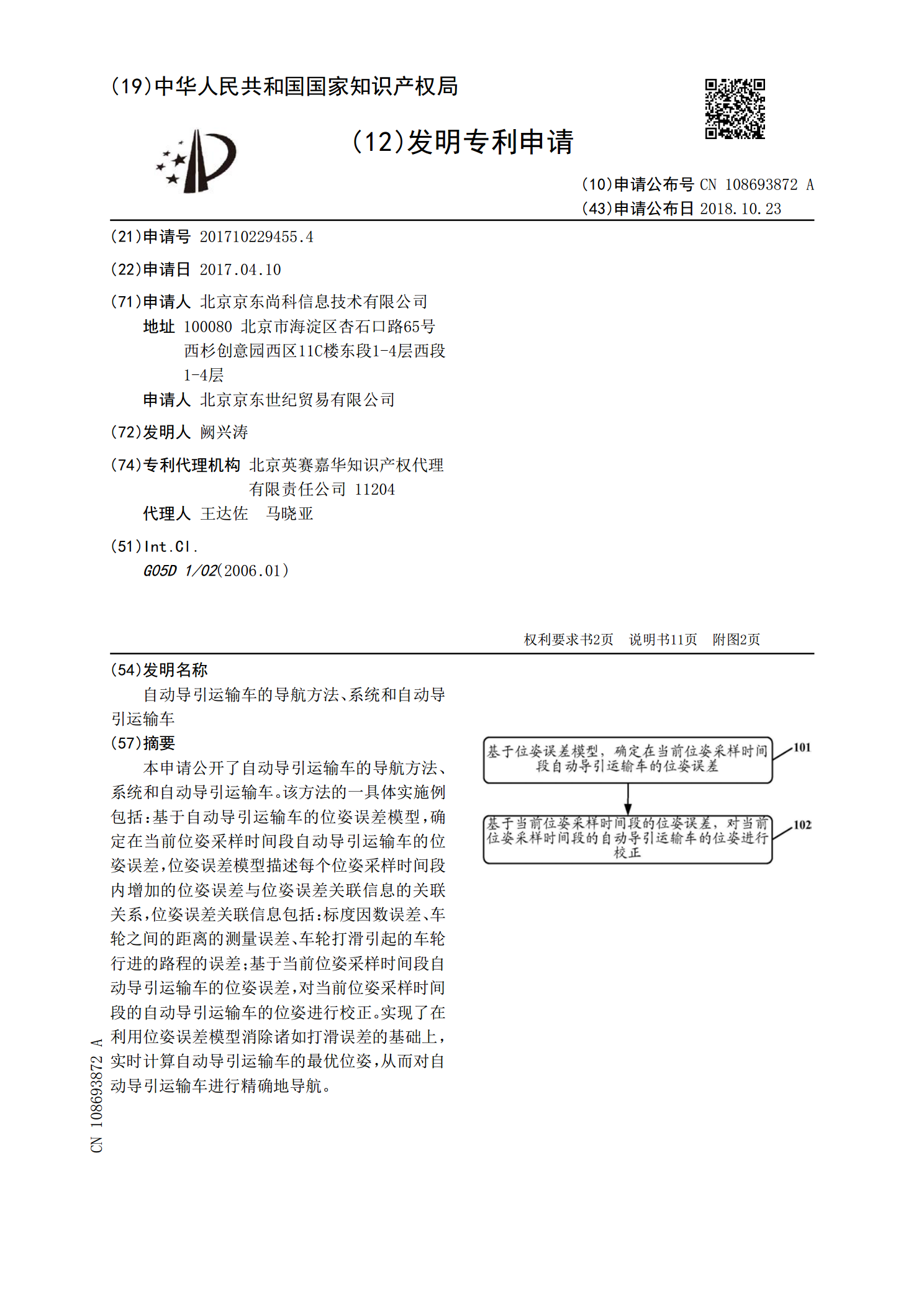
本申请公开了自动导引运输车的导航方法、系统和自动导引运输车。该方法的一具体实施例包括:基于自动导引运输车的位姿误差模型,确定在当前位姿采样时间段自动导引运输车的位姿误差,位姿误差模型描述每个位姿采样时间段内增加的位姿误差与位姿误差关联信息的关联关系,位姿误差关联信息包括:标度因数误差、车轮之间的距离的测量误差、车轮打滑引起的车轮行进的路程的误差;基于当前位姿采样时间段自动导引运输车的位姿误差,对当前位姿采样时间段的自动导引运输车的位姿进行校正。实现了在利用位姿误差模型消除诸如打滑误差的基础上,实时计算自动
自动导引运输车的控制方法、装置及自动导引运输车.pdf
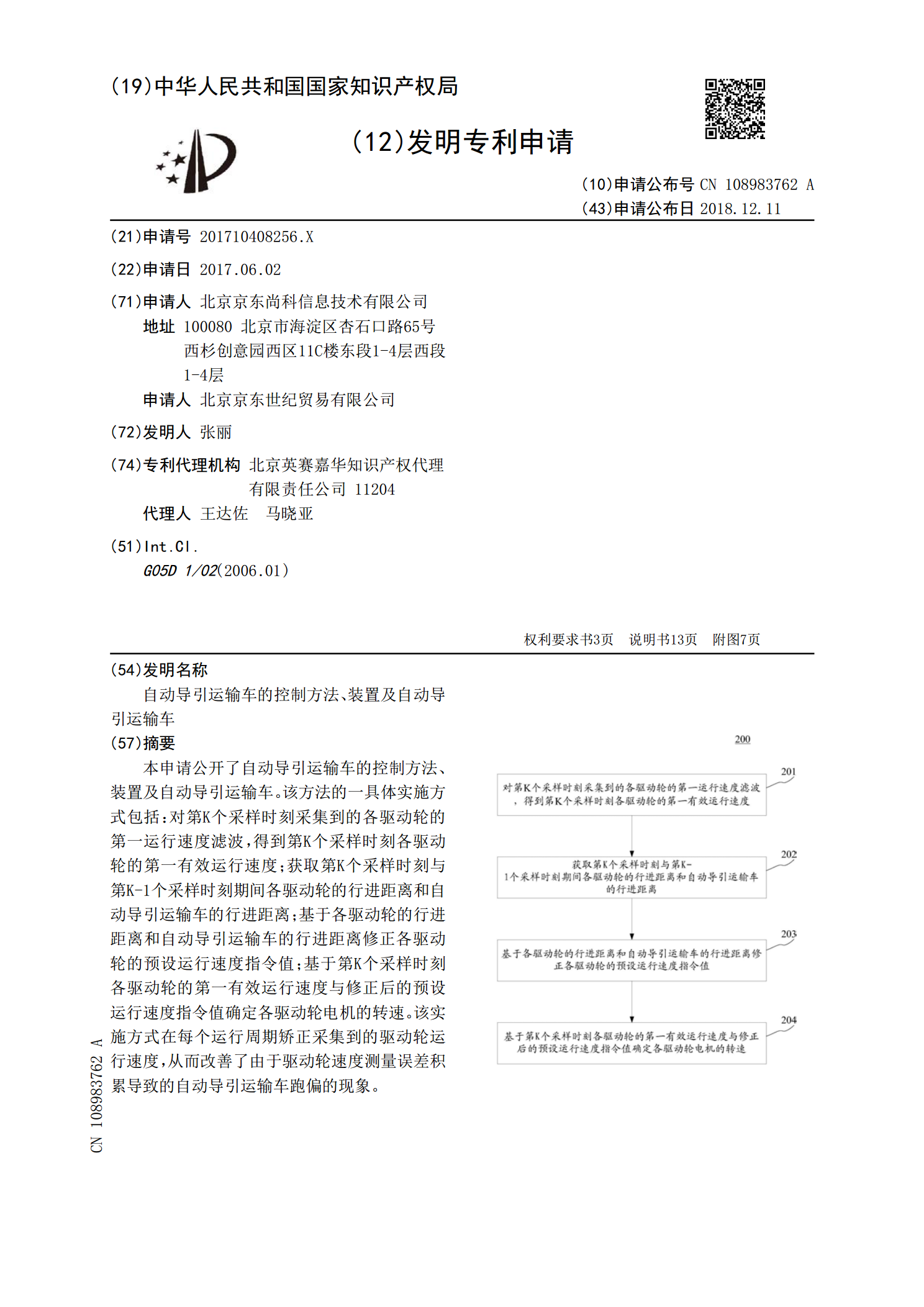
本申请公开了自动导引运输车的控制方法、装置及自动导引运输车。该方法的一具体实施方式包括:对第K个采样时刻采集到的各驱动轮的第一运行速度滤波,得到第K个采样时刻各驱动轮的第一有效运行速度;获取第K个采样时刻与第K‑1个采样时刻期间各驱动轮的行进距离和自动导引运输车的行进距离;基于各驱动轮的行进距离和自动导引运输车的行进距离修正各驱动轮的预设运行速度指令值;基于第K个采样时刻各驱动轮的第一有效运行速度与修正后的预设运行速度指令值确定各驱动轮电机的转速。该实施方式在每个运行周期矫正采集到的驱动轮运行速度,从而改

全方位自动导航车的设计与研究的开题报告.docx
全方位自动导航车的设计与研究的开题报告一、课题背景目前,自动化技术的不断发展,已经在物流、运输等领域得到广泛应用,其中自动导航车在物流运输中具有不可替代的重要作用。自动导航车可以通过内置的导航系统和传感器实现自主移动,不受人为干扰,并且具有高度的自主性和智能化,可以实现货物的自动运输。传统的物流运输需要人工操作,成本较高,速度较慢,并且时间缺乏灵活性,而自动导航车可以有效缩短运输时间,提高运输效率,降低运输成本,减少人力和时间的浪费,因此得到了越来越多的关注。二、课题研究目的本课题旨在设计和研究一种全方位

基于组合导航的自动导引车的定位研究的开题报告.docx
基于组合导航的自动导引车的定位研究的开题报告一、选题背景随着社会的不断发展,人们的生活水平逐步提高,出行方式也变得更加多样化。汽车作为人们日常出行的主要工具之一,在发展过程中也经历了较大的变革,其中一项重要的技术就是自动驾驶技术。在自动驾驶技术中,车辆的定位精度是至关重要的,而基于组合导航的自动导引车可以有效提升车辆的定位精度,从而提高了自动驾驶的效果和安全性。二、选题意义1.提高自动驾驶的稳定性。基于组合导航的自动导引车可以通过组合GPS、IMU、激光雷达等多个传感器,实现更加精准的定位和导航。在不同的