
上肢外骨骼机器人的阻抗控制与关节试验研究.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

上肢外骨骼机器人的阻抗控制与关节试验研究.docx
上肢外骨骼机器人的阻抗控制与关节试验研究标题:上肢外骨骼机器人的阻抗控制与关节试验研究摘要:随着人口老龄化问题的日益加剧,上肢功能障碍的患者数量逐年增长。上肢外骨骼机器人被认为是改善这一群体生活质量的有效工具。本文通过对上肢外骨骼机器人的阻抗控制与关节试验的研究,旨在提高外骨骼机器人的适应性和技术性能,从而更好地满足患者的康复需求。首先,本文介绍了上肢外骨骼机器人的相关背景和研究意义。接着,针对阻抗控制方法和关节试验技术进行了深入探讨,并分析了它们在上肢外骨骼机器人设计中的应用。最后,对未来可能的研究方向

上肢康复外骨骼机器人控制方法进展研究.pptx
上肢康复外骨骼机器人控制方法进展研究目录添加目录项标题上肢康复外骨骼机器人概述定义与功能分类与特点应用领域上肢康复外骨骼机器人控制方法研究现状神经网络控制方法模糊逻辑控制方法滑模控制方法鲁棒控制方法上肢康复外骨骼机器人控制方法研究进展新型控制算法研究控制精度与稳定性提升研究人机交互与协同控制研究智能化与自适应控制研究上肢康复外骨骼机器人控制方法面临的挑战与展望挑战分析未来发展方向技术创新与应用前景结论研究成果总结对未来研究的建议与展望感谢观看

下肢助力外骨骼机器人自适应阻抗控制研究.docx
下肢助力外骨骼机器人自适应阻抗控制研究随着社会的不断发展,人们的生活水平在不断提高,但是一些身体部位受到损伤或疾病,从而导致他们的生活质量大幅下降,不得不依赖助力器来维持日常生活的进行。因此,助力外骨骼机器人逐渐成为人们关注的热点,它可以有效地帮助残疾人、老年人等在行动方面得到更好的帮助。其中,下肢助力外骨骼机器人是目前研究的热点之一,因为可以帮助失去行动能力的人恢复行动自由。但是,长期以来,下肢助力外骨骼机器人技术存在一些挑战,包括适应性差、控制精度不足等问题。针对这些问题,本文提出了自适应阻抗控制的方
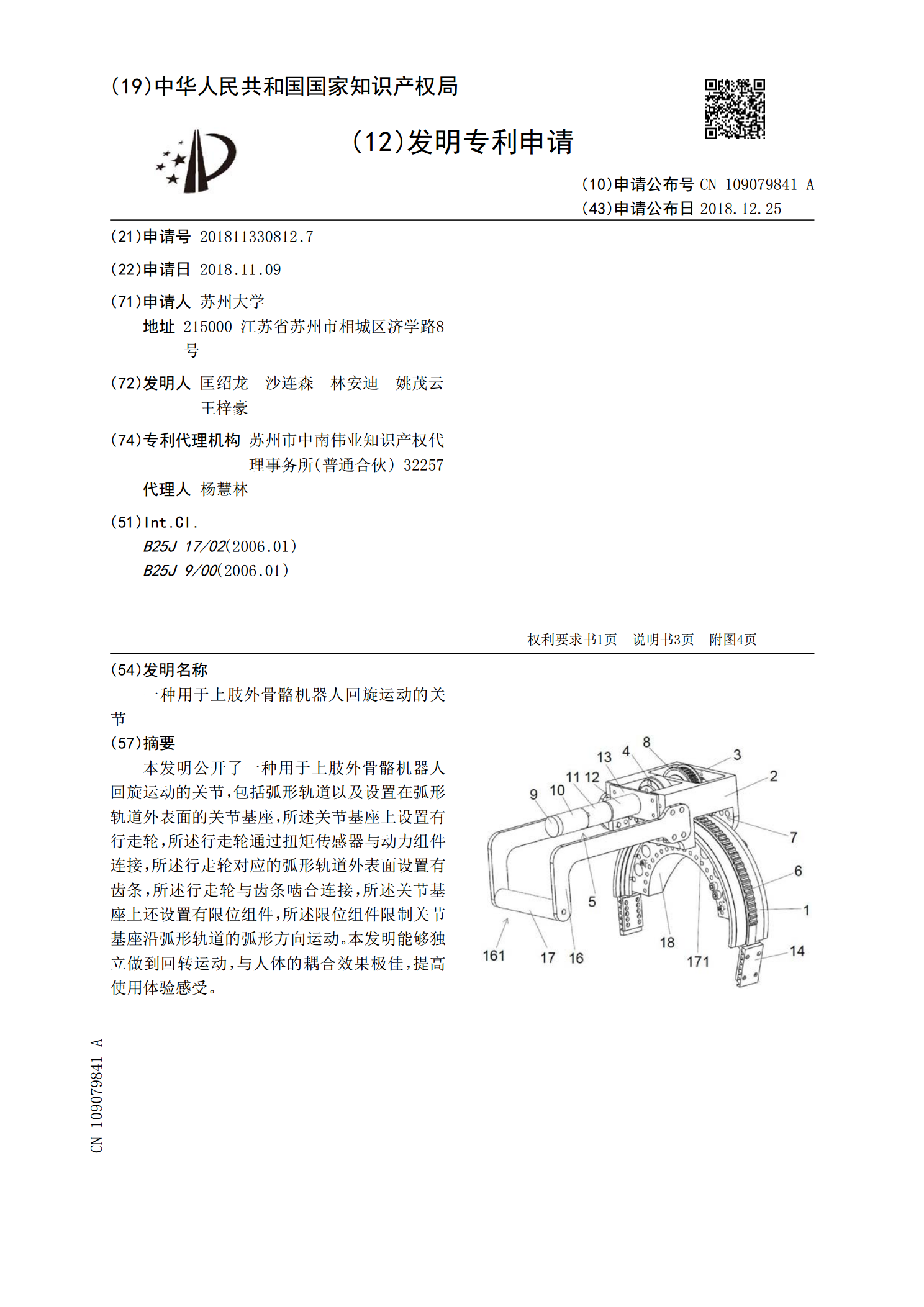
一种用于上肢外骨骼机器人回旋运动的关节.pdf
本发明公开了一种用于上肢外骨骼机器人回旋运动的关节,包括弧形轨道以及设置在弧形轨道外表面的关节基座,所述关节基座上设置有行走轮,所述行走轮通过扭矩传感器与动力组件连接,所述行走轮对应的弧形轨道外表面设置有齿条,所述行走轮与齿条啮合连接,所述关节基座上还设置有限位组件,所述限位组件限制关节基座沿弧形轨道的弧形方向运动。本发明能够独立做到回转运动,与人体的耦合效果极佳,提高使用体验感受。
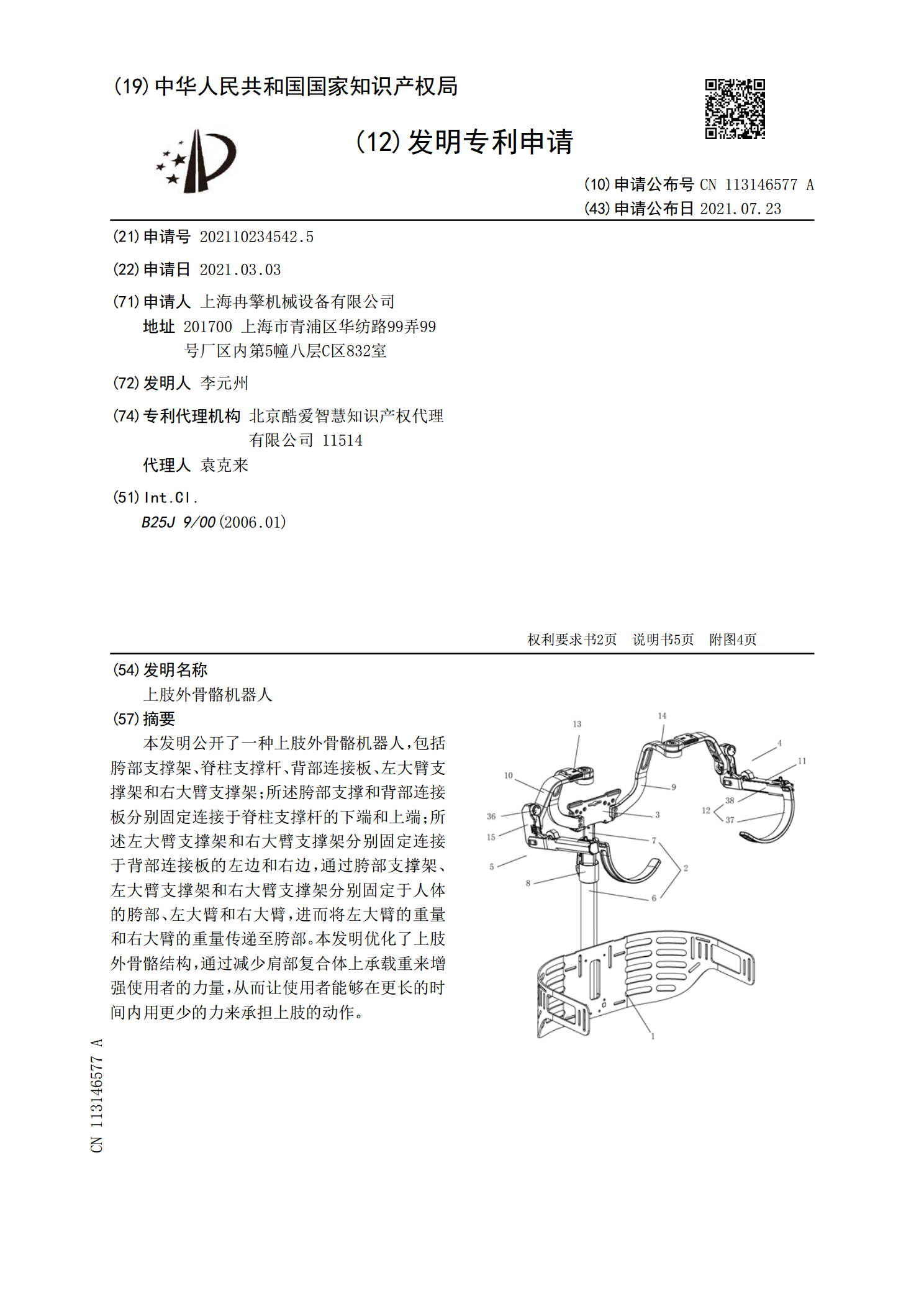
上肢外骨骼机器人.pdf
本发明公开了一种上肢外骨骼机器人,包括胯部支撑架、脊柱支撑杆、背部连接板、左大臂支撑架和右大臂支撑架;所述胯部支撑和背部连接板分别固定连接于脊柱支撑杆的下端和上端;所述左大臂支撑架和右大臂支撑架分别固定连接于背部连接板的左边和右边,通过胯部支撑架、左大臂支撑架和右大臂支撑架分别固定于人体的胯部、左大臂和右大臂,进而将左大臂的重量和右大臂的重量传递至胯部。本发明优化了上肢外骨骼结构,通过减少肩部复合体上承载重来增强使用者的力量,从而让使用者能够在更长的时间内用更少的力来承担上肢的动作。