
一种基于边缘系数的闭合点云边缘提取算法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于边缘系数的闭合点云边缘提取算法.docx
一种基于边缘系数的闭合点云边缘提取算法基于边缘系数的闭合点云边缘提取算法摘要:点云是一种常用于三维场景建模和重建的数据表示形式。边缘提取是点云处理中的一个重要任务,它能够提取出点云中的重要边缘信息,对于点云的分割、配准和识别等任务有很大帮助。本文提出了一种基于边缘系数的闭合点云边缘提取算法,通过对点云的边缘特征进行建模,并根据边缘系数进行边缘线提取和闭合边缘的连接。实验证明,该算法能够有效提取出闭合点云中的边缘信息,具有较高的准确性和鲁棒性,在点云处理中具有较广泛的应用前景。关键词:点云处理、边缘提取、边

基于高斯映射聚类的点云边缘提取算法.docx
基于高斯映射聚类的点云边缘提取算法基于高斯映射聚类的点云边缘提取算法摘要:点云边缘提取是计算机视觉领域的一个重要研究方向,旨在从点云数据中提取出物体的边缘信息。本文提出了一种基于高斯映射聚类的点云边缘提取算法,通过将点云数据映射到高斯分布中,利用聚类方法提取出边缘点云,并进行后处理以获得更加准确的边缘信息。1.引言近年来,点云数据的应用越来越广泛,尤其在三维重建、机器人导航和虚拟现实等领域有着广泛的应用。在这些应用中,点云边缘提取是一个重要的预处理步骤,它能够提取出点云数据中的物体边界,为后续的处理和分析

一种基于八邻域深度差的点云边缘提取算法.docx
一种基于八邻域深度差的点云边缘提取算法标题:基于八邻域深度差的点云边缘提取算法研究摘要:点云数据是三维物体表面的离散表示,边缘提取是点云处理的关键步骤之一。本论文提出一种基于八邻域深度差的点云边缘提取算法,通过对点云数据进行预处理、邻域选择和深度差计算,实现了高效而准确的点云边缘提取。实验结果表明,该算法在不同场景和数据集上都具有较好的效果,可广泛应用于点云处理领域。1.简介1.1背景随着三维扫描技术的快速发展,获取大规模点云数据变得越来越容易。而点云数据的边缘信息对于三维物体的建模、识别和重建非常重要。
一种基于点云的物体边缘点提取方法.pdf
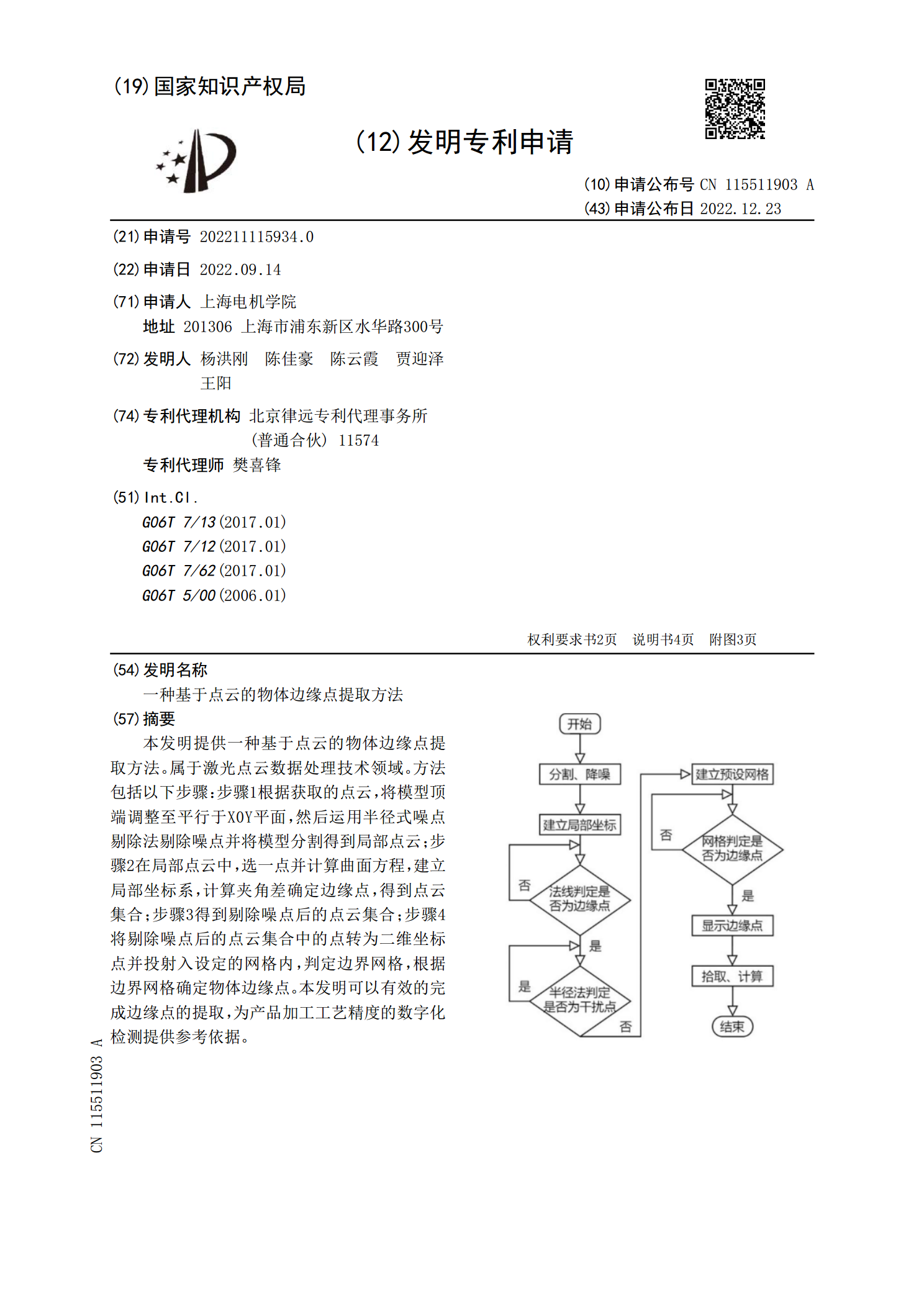
本发明提供一种基于点云的物体边缘点提取方法。属于激光点云数据处理技术领域。方法包括以下步骤:步骤1根据获取的点云,将模型顶端调整至平行于X0Y平面,然后运用半径式噪点剔除法剔除噪点并将模型分割得到局部点云;步骤2在局部点云中,选一点并计算曲面方程,建立局部坐标系,计算夹角差确定边缘点,得到点云集合;步骤3得到剔除噪点后的点云集合;步骤4将剔除噪点后的点云集合中的点转为二维坐标点并投射入设定的网格内,判定边界网格,根据边界网格确定物体边缘点。本发明可以有效的完成边缘点的提取,为产品加工工艺精度的数字化检测提

基于邻域栅格筛选的点云边缘点提取方法.pptx
基于邻域栅格筛选的点云边缘点提取方法目录邻域栅格筛选方法栅格生成邻域定义筛选条件筛选过程点云边缘点提取边缘点定义提取步骤提取结果方法优势与局限性优势分析局限性分析改进方向THANKYOU