
林业攀爬机器人研究现状及关键技术综述.docx

骑着****猪猪


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

林业攀爬机器人研究现状及关键技术综述.docx
林业攀爬机器人研究现状及关键技术综述林业攀爬机器人研究现状及关键技术综述随着人类对自然环境的破坏加剧,林业资源的保护和管理越来越受到重视。传统的林业管理方法过于依赖人工操作,难以满足大规模林区的管理需要。此外,林区多为崎岖不平的地形,具有较强、独特的生态环境,这些也对林业管理技术提出了更高的要求。于是,研究开发适用于林区运行的机器人成为了必要。林业攀爬机器人在林区维护和管理方面有广泛的应用前景,尤其是在高山、悬崖区域里,机器人可以代替人类进行高危或者高难度任务,提高安全性和工作效率。在林业攀爬机器人的运行

煤矿搜救机器人的研究现状及关键技术分析.docx
煤矿搜救机器人的研究现状及关键技术分析煤矿搜救机器人的研究现状及关键技术分析摘要:随着煤矿事故的频繁发生,煤矿搜救机器人作为一种新兴的搜救工具受到了广泛关注。本文结合国内外相关研究成果,对煤矿搜救机器人的研究现状和关键技术进行了分析与总结。其中包括机器人定位与导航技术、环境感知与地图构建技术、通信与控制技术、机械设计与特种材料应用技术等方面的内容。通过对相关研究成果的分析,提出了未来煤矿搜救机器人研究的方向和挑战。1.引言随着煤矿行业的快速发展,煤矿事故频繁发生,对搜救工作提出了更高的要求。传统的搜救方式
基于攀爬机器人的攀爬方法.pdf
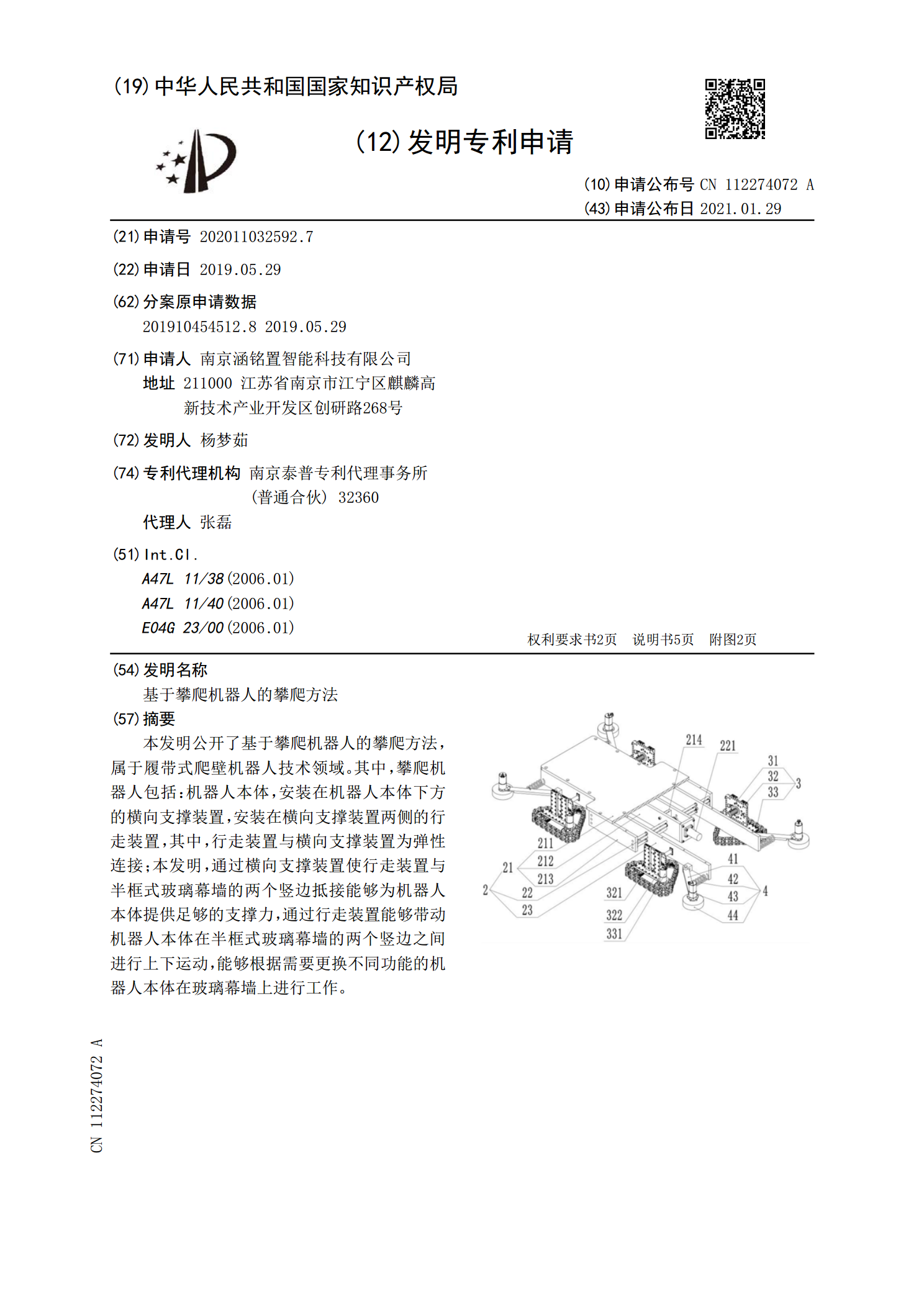
本发明公开了基于攀爬机器人的攀爬方法,属于履带式爬壁机器人技术领域。其中,攀爬机器人包括:机器人本体,安装在机器人本体下方的横向支撑装置,安装在横向支撑装置两侧的行走装置,其中,行走装置与横向支撑装置为弹性连接;本发明,通过横向支撑装置使行走装置与半框式玻璃幕墙的两个竖边抵接能够为机器人本体提供足够的支撑力,通过行走装置能够带动机器人本体在半框式玻璃幕墙的两个竖边之间进行上下运动,能够根据需要更换不同功能的机器人本体在玻璃幕墙上进行工作。

外骨骼康复机器人研究现状及关键技术.ppt
外骨骼康复机器人研究现状及关键技术定义日本Tmsuk公司开发的T52Enryu,重量近5吨,身高达3米,可用于任何灾害的救援工作中,能帮助工作人员清理路上的碎片,能够举起重量近1吨的重物,机械臂则可以完成所有类型的工作。被谋杀的教授步行辅助设备,由美国弗吉尼亚理工大学的凯文·格拉纳塔教授研制的下肢外骨骼机器人,能够帮助少肌症患者恢复身体机能,少肌症可导致人体的骨骼肌流失,他研制的步行辅助外骨骼却仍在帮助着很多患者。日本科技公司“赛百达因”研制的HAL-5是一款半机器人,它装有主动控制系统,肌肉通过运动神经

外骨骼康复机器人研究现状及关键技术.ppt
........................