
重型卡车防翻侧控制电路和控制软件的研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

重型卡车防翻侧控制电路和控制软件的研究.docx
重型卡车防翻侧控制电路和控制软件的研究标题:重型卡车防翻侧控制电路和控制软件的研究摘要:随着交通运输行业的快速发展,重型卡车在货物运输中扮演着重要角色。然而,由于其体型庞大且运行速度较高,重型卡车在行驶过程中容易发生翻侧事故,威胁到道路交通安全。为解决这一问题,本文以重型卡车防翻侧控制为研究方向,重点探讨了防翻侧控制电路和控制软件的设计与优化方法。关键词:重型卡车;防翻侧控制;电路设计;控制软件;优化方法一、引言重型卡车在道路运输中发挥着至关重要的作用,然而,其巨大的体积和运行速度也带来了一系列的安全隐患

重型卡车防翻侧控制电路和控制软件的研究的开题报告.docx
重型卡车防翻侧控制电路和控制软件的研究的开题报告一、选题背景及意义随着经济的发展,重型卡车在物流运输中所占比重越来越大,但是由于其体积庞大、重心高、行驶速度快等因素,使得其在行驶过程中容易发生侧翻事故,给车辆行驶安全带来极大威胁。因此,如何防止重型卡车侧翻事故的发生成为了当前一个重要的研究方向。二、研究目的和内容本研究将综合应用控制电路和控制软件的方法,设计一套重型卡车防翻侧控制系统,通过车速、转向角度、倾斜角度等传感器的实时监测和数据处理,实现对车辆稳定性的控制,避免发生侧翻事故。具体内容包括:1.选用

重型卡车转弯防侧翻的控制机理研究.docx
重型卡车转弯防侧翻的控制机理研究重型卡车转弯防侧翻的控制机理研究摘要:重型卡车在曲线道路上转弯时容易发生侧翻事故,严重威胁交通安全。本论文以重型卡车转弯防侧翻为研究对象,通过分析侧翻事故的原因和卡车在转弯时的运动特性,探讨了减小侧翻风险的控制机理和方法。研究表明,通过合理设计车辆结构,改善悬挂系统以及引入电子稳定控制系统等措施,可以有效增强卡车的稳定性,降低侧翻风险。此外,驾驶员的技术水平和驾驶行为也对重型卡车的侧翻风险有重要影响,因此,培训和规范驾驶员的行为也是防止侧翻事故的关键因素。本研究为提高重型卡

用于重型卡车的防侧翻装置.pdf
本发明公开了一种用于重型卡车的防侧翻装置,包括固定臂1、中间连接装置2和外伸臂3,其特征在于:所述固定臂1可与重型卡车的车头牵引架4或挂车底架5紧固连接;所述中间连接装置2分别连接于固定臂1的两端;所述外伸臂3一端与中间连接装置2相连,另一端有自由旋转的支撑轮34用于侧翻时在地面上的支撑,所述外伸臂3相对于固定臂1在垂直于固定臂安装面17的平面内的角度可调节,以分别适应于侧翻试验时不同侧翻角度的支撑要求,其还可绕固定臂1在平行于固定臂安装面17的平面内旋转收回并固定,以方便运输。优点是:本装置可适用于重型
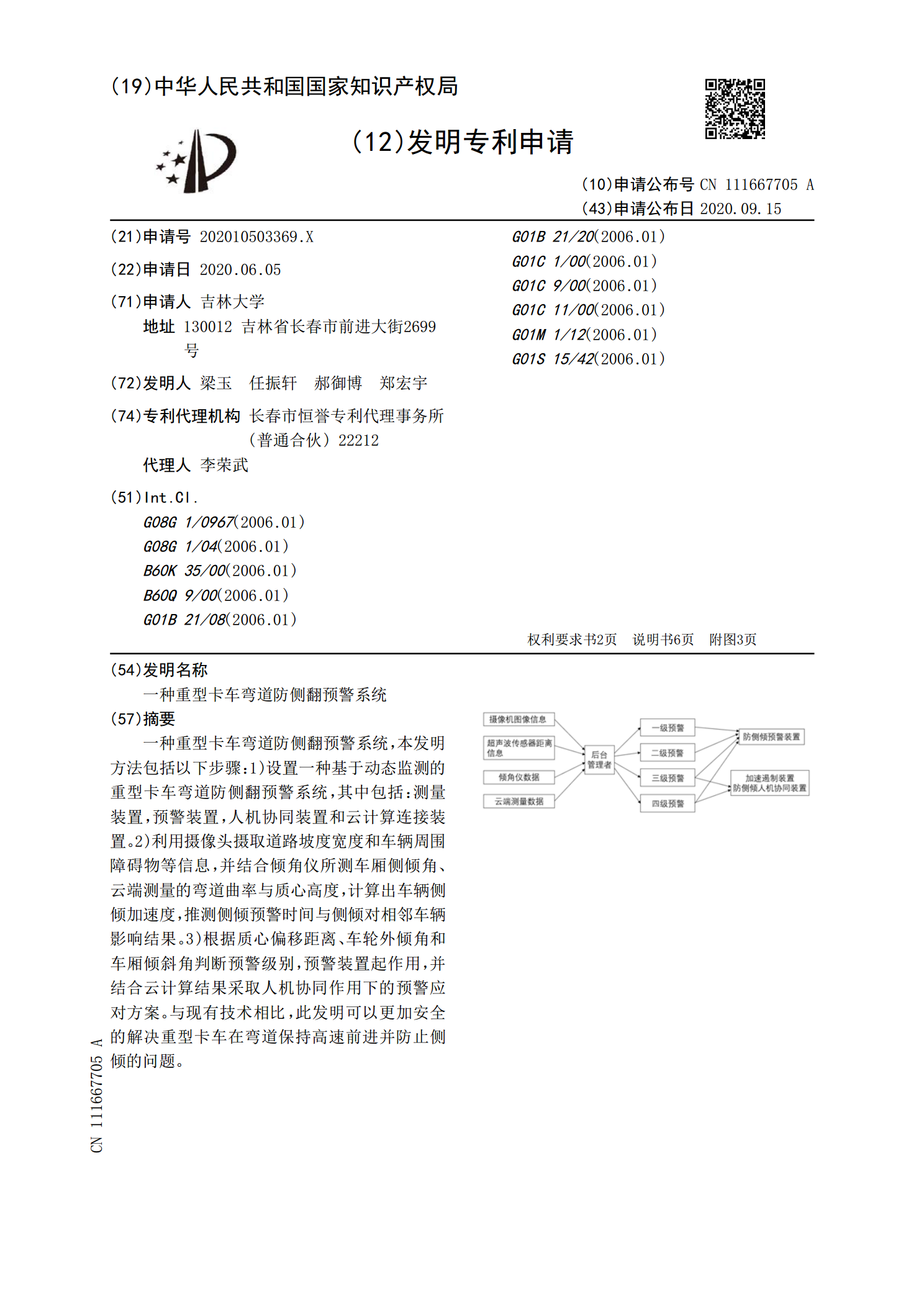
一种重型卡车弯道防侧翻预警系统.pdf
一种重型卡车弯道防侧翻预警系统,本发明方法包括以下步骤:1)设置一种基于动态监测的重型卡车弯道防侧翻预警系统,其中包括:测量装置,预警装置,人机协同装置和云计算连接装置。2)利用摄像头摄取道路坡度宽度和车辆周围障碍物等信息,并结合倾角仪所测车厢侧倾角、云端测量的弯道曲率与质心高度,计算出车辆侧倾加速度,推测侧倾预警时间与侧倾对相邻车辆影响结果。3)根据质心偏移距离、车轮外倾角和车厢倾斜角判断预警级别,预警装置起作用,并结合云计算结果采取人机协同作用下的预警应对方案。与现有技术相比,此发明可以更加安全的解决