
非高斯环境下的车辆定位与状态估计关键技术(英文版).docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

非高斯环境下的车辆定位与状态估计关键技术(英文版).docx
非高斯环境下的车辆定位与状态估计关键技术(英文版)Title:KeyTechniquesforVehicleLocalizationandStateEstimationinNon-GaussianEnvironmentsAbstract:Modernvehiclesrequireaccurateandrobustlocalizationandstateestimationtechniquestoensuresafeandefficientoperations.Traditionalmethodsbased

面向非高斯噪声环境的车辆行驶状态估计方法.pdf
本发明公开了面向非高斯噪声环境的车辆行驶状态估计方法,包括:设计轮胎力估计器,结合车辆动力学模型及普通车载传感器信号,基于卡尔曼滤波理论估计车辆四轮的纵向力和侧向力;设计非线性车辆状态估计器,结合七自由度车辆动力学模型,利用轮胎力估计器获取的信息及普通车载传感器信号,基于集员卡尔曼滤波理论在非高斯噪声环境下估计四轮驱动车辆行驶过程中的纵向车速、侧向车速和质心侧偏角。该方法能够实时监测轮胎力状况和车辆状态信息,很好的解决了车辆状态估计过程中轮胎模型和噪声模型的误差问题,为汽车的主动安全控制提供基础。

非高斯噪声下输出残差或状态估计误差的熵研究.docx
非高斯噪声下输出残差或状态估计误差的熵研究随着科学技术和现代社会的迅猛发展,无线通信、机器人控制、自动驾驶等领域的发展对于噪声问题的要求越来越高,并且噪声问题的解决对于这些领域的发展来说具有非常重要的意义。因此,对于非高斯噪声下估计误差的熵研究成为了一项重要的研究。本文将着重阐述非高斯噪声下输出残差或状态估计误差的熵研究。首先,我们需要了解什么是非高斯噪声。传统的高斯噪声是一种具有高斯分布的随机噪声,即其概率分布函数为正态分布。然而,现实生活中的噪声往往不仅仅只有高斯分布,还会有其他形式的噪声出现,例如泊
非高斯噪声背景下微弱信号参量估计方法研究.pptx
汇报人:CONTENTSPARTONEPARTTWO研究背景研究意义PARTTHREE非高斯噪声定义与特性非高斯噪声的来源与影响非高斯噪声处理的重要性PARTFOUR微弱信号的定义与特性微弱信号参量估计的挑战微弱信号参量估计的常用方法PARTFIVE非高斯噪声对微弱信号参量估计的影响非高斯噪声背景下微弱信号参量估计的新方法新方法的有效性与优越性分析PARTSIX实验系统与实验设计实验结果展示与分析实验结果与理论预期的对比分析PARTSEVEN研究结论总结研究成果的应用前景与价值对未来研究的展望与建议汇报人
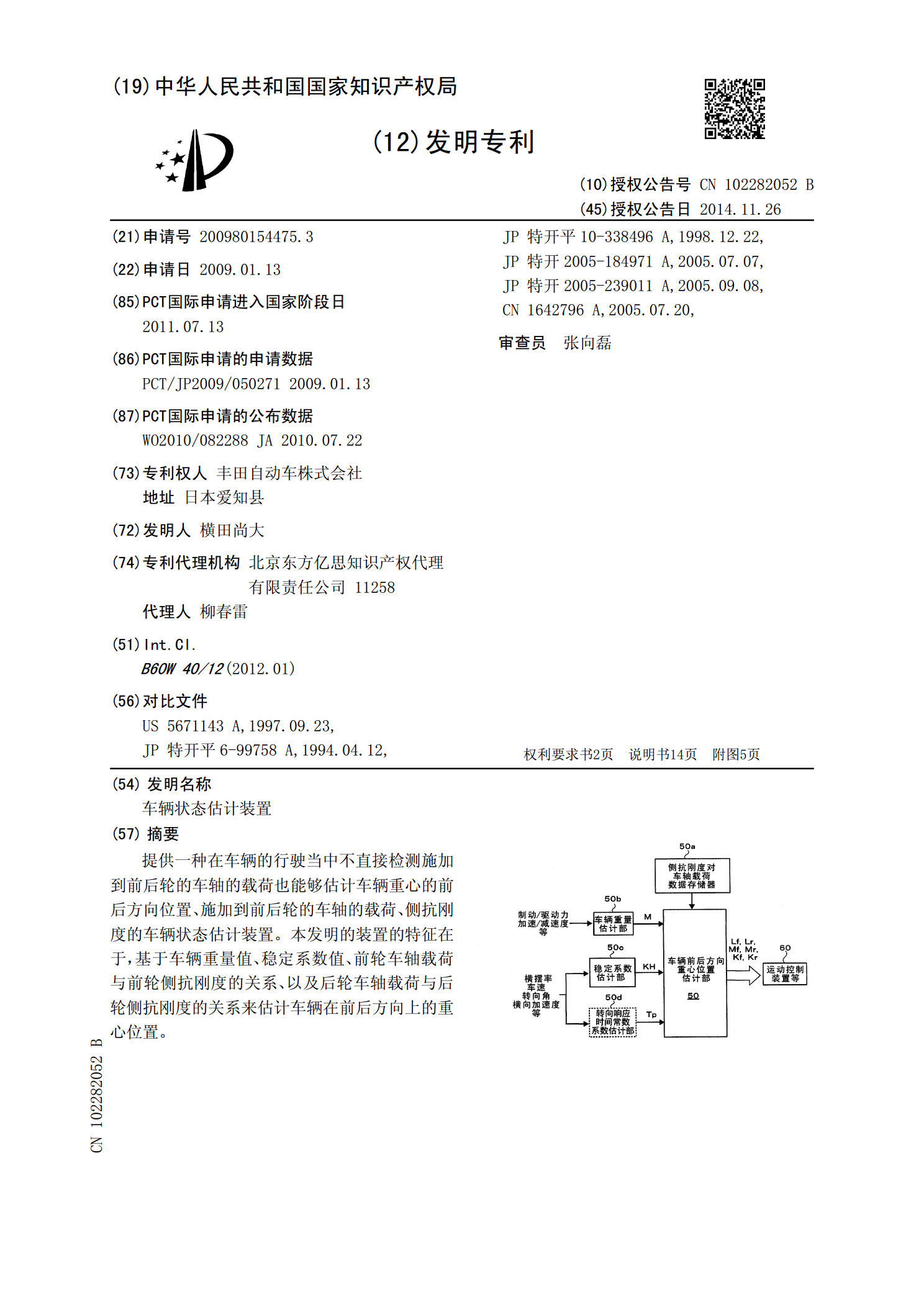
车辆状态估计装置.pdf
提供一种在车辆的行驶当中不直接检测施加到前后轮的车轴的载荷也能够估计车辆重心的前后方向位置、施加到前后轮的车轴的载荷、侧抗刚度的车辆状态估计装置。本发明的装置的特征在于,基于车辆重量值、稳定系数值、前轮车轴载荷与前轮侧抗刚度的关系、以及后轮车轴载荷与后轮侧抗刚度的关系来估计车辆在前后方向上的重心位置。