
液压加载系统鲁棒控制器设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

液压加载系统鲁棒控制器设计.docx
液压加载系统鲁棒控制器设计液压加载系统鲁棒控制器设计摘要:随着液压技术的不断发展,液压加载系统在工程领域中得到了广泛的应用。然而,在实际应用过程中,液压加载系统往往会受到外部扰动和参数变化的影响,从而导致控制性能下降。为了解决这个问题,本文提出了一种液压加载系统的鲁棒控制器设计方法。该方法通过分析液压系统的工作特点,确定了系统的数学模型,并采用鲁棒控制理论设计了控制器。最后,通过仿真实验验证了所提方法的有效性。关键词:液压加载系统;鲁棒控制器;控制性能;数学模型;仿真实验1.引言液压加载系统是工程领域中常
液压加载器.pdf
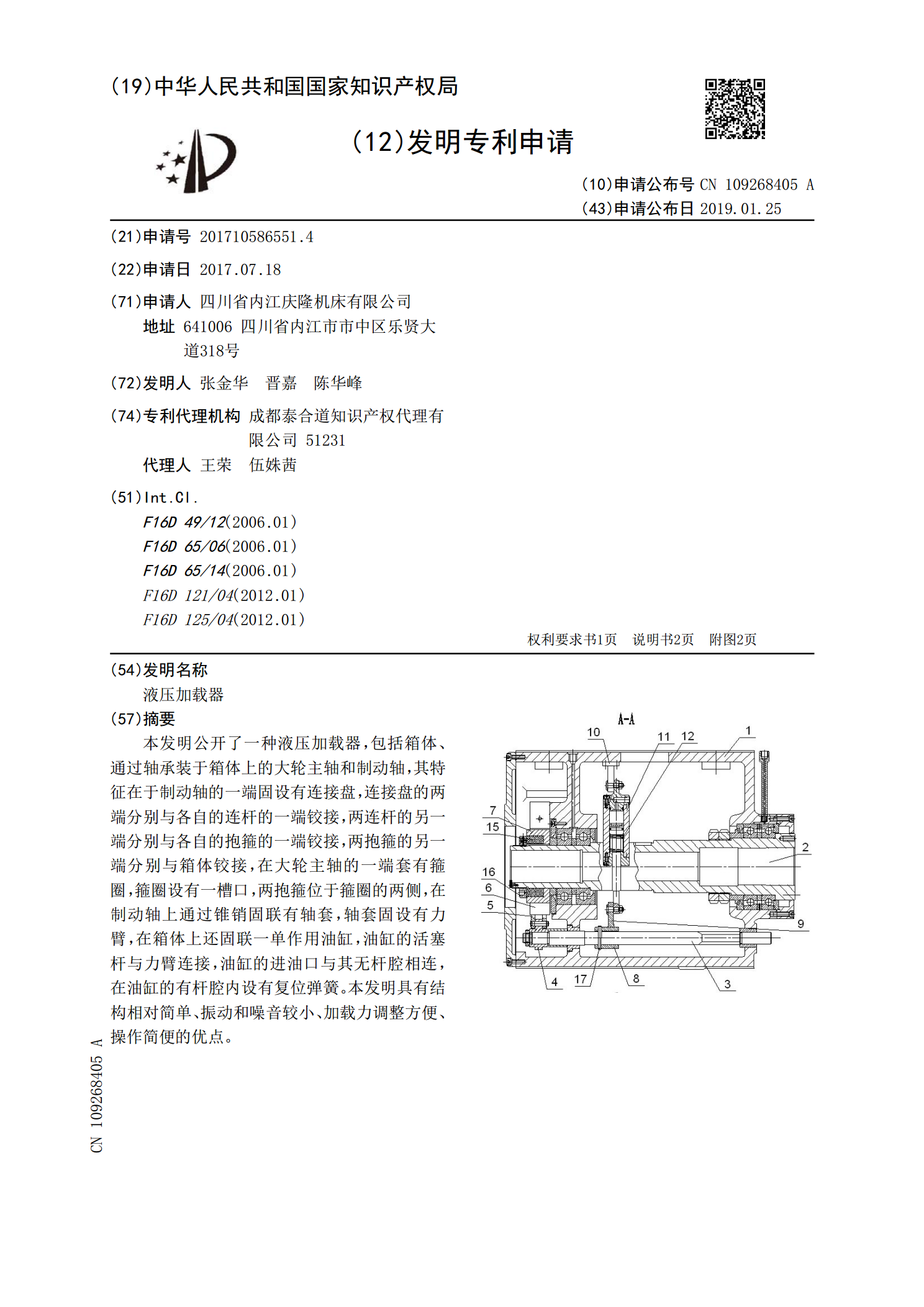
本发明公开了一种液压加载器,包括箱体、通过轴承装于箱体上的大轮主轴和制动轴,其特征在于制动轴的一端固设有连接盘,连接盘的两端分别与各自的连杆的一端铰接,两连杆的另一端分别与各自的抱箍的一端铰接,两抱箍的另一端分别与箱体铰接,在大轮主轴的一端套有箍圈,箍圈设有一槽口,两抱箍位于箍圈的两侧,在制动轴上通过锥销固联有轴套,轴套固设有力臂,在箱体上还固联一单作用油缸,油缸的活塞杆与力臂连接,油缸的进油口与其无杆腔相连,在油缸的有杆腔内设有复位弹簧。本发明具有结构相对简单、振动和噪音较小、加载力调整方便、操作简便的

基于AME Sim的液压加载系统设计与仿真.docx
基于AMESim的液压加载系统设计与仿真摘要液压加载系统是一种常见的工程应用,用于模拟和测试各种机械装置和结构的工作状态。本论文以AMESim为基础,设计和仿真了一种液压加载系统。首先,介绍了液压系统的工作原理和主要组成部分。然后,详细阐述了液压加载系统的设计思路和步骤,包括选取和配套液压元件、确定系统参数和计算液压缸的尺寸。最后,通过AMESim软件进行了系统的仿真分析和性能评估。仿真结果表明,设计的液压加载系统能够满足工作要求,并具有较好的稳定性和控制精度。本论文为液压加载系统的设计和仿真提供了一种有

基于AMESim的液压支架加载系统设计与研究.docx
基于AMESim的液压支架加载系统设计与研究基于AMESim的液压支架加载系统设计与研究摘要:随着工业技术的不断发展,液压技术在许多领域得到了广泛应用,其中液压支架加载系统作为一种重要的工程应用已成为研究的热点。本文以AMESim为工具,通过建立液压支架加载系统的仿真模型,探讨了系统的性能和工作原理,从而实现对系统的优化设计。通过本次研究,得出液压支架加载系统在减小结构应力和提高工作效率方面的优越性,并提出了进一步改进的建议。关键词:液压支架加载系统;AMESim;仿真模型;优化设计1.引言液压工程作为一
用于多种载荷加载的液压加载系统.pdf
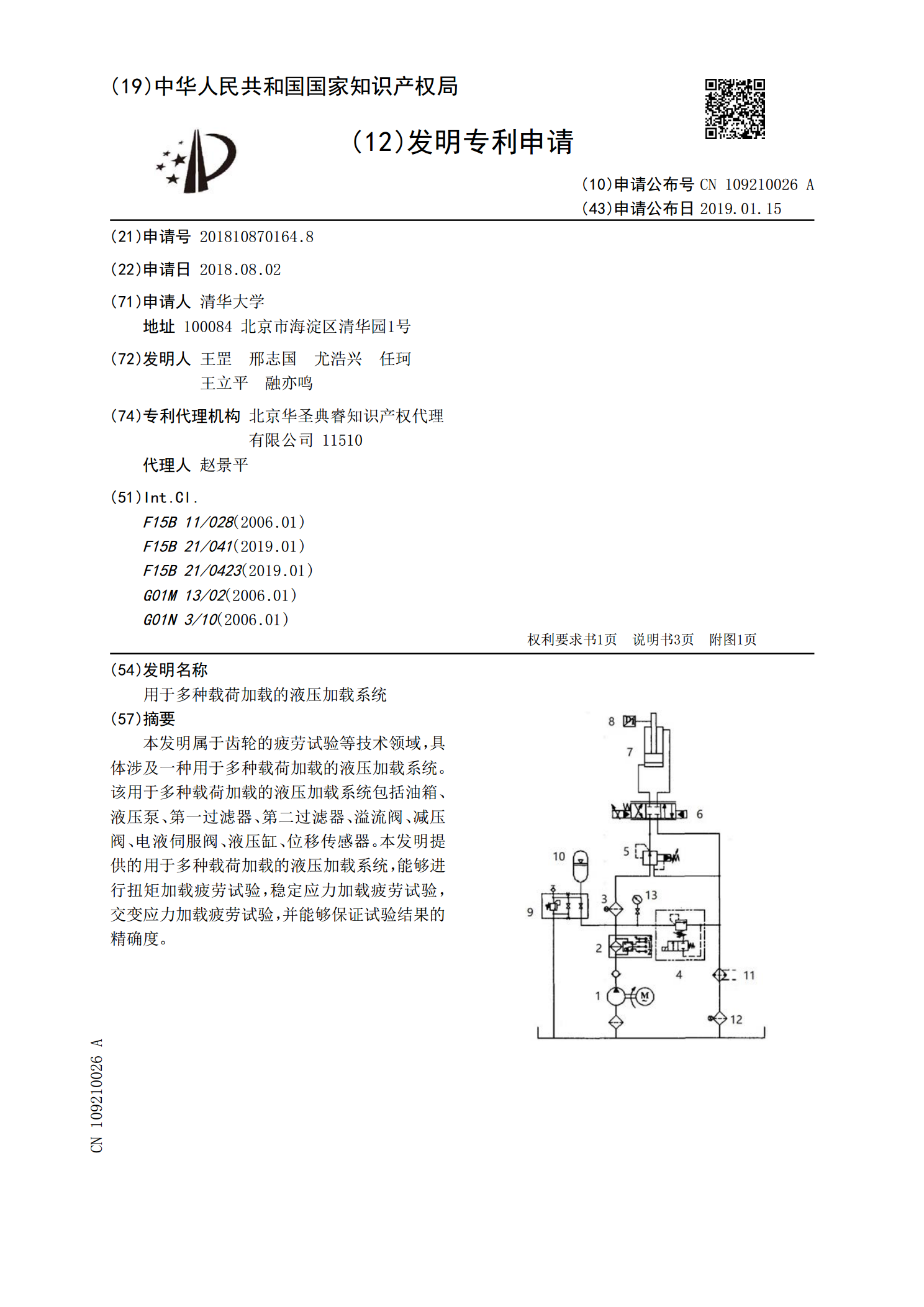
本发明属于齿轮的疲劳试验等技术领域,具体涉及一种用于多种载荷加载的液压加载系统。该用于多种载荷加载的液压加载系统包括油箱、液压泵、第一过滤器、第二过滤器、溢流阀、减压阀、电液伺服阀、液压缸、位移传感器。本发明提供的用于多种载荷加载的液压加载系统,能够进行扭矩加载疲劳试验,稳定应力加载疲劳试验,交变应力加载疲劳试验,并能够保证试验结果的精确度。