
激光雷达室内SLAM方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

激光雷达室内SLAM方法.docx
激光雷达室内SLAM方法激光雷达室内SLAM方法摘要:随着无人驾驶和自主导航技术的发展,激光雷达室内SLAM(SimultaneousLocalizationandMapping)在室内环境中的应用越来越广泛。本文将详细介绍激光雷达室内SLAM的基本原理、常用算法以及未来发展方向。1.引言激光雷达室内SLAM是指利用激光雷达传感器获取室内环境的三维点云数据,并通过同时定位和建图算法实现实时的室内定位和地图构建。室内环境相较于室外环境而言,存在大量的平面结构和闭环特征,这为激光雷达室内SLAM提供了更加稳定

激光雷达室内SLAM方法的任务书.docx
激光雷达室内SLAM方法的任务书一、概述随着激光雷达技术的发展,激光雷达被广泛应用于室内SLAM(SimultaneousLocalizationandMapping,即同时定位和建图)中。在室内环境下,激光雷达可以利用其高精度、高准确度和长距离探测的特点,实现室内环境的三维建模和精确定位,在机器人导航、无人驾驶、智能家居等应用方面具有广泛的应用前景。本任务书将针对激光雷达在室内SLAM中的常用方法,包括地图表示、定位算法、建图算法、轨迹优化等方面进行介绍和分析,以便能够更好地理解激光雷达室内SLAM的原
激光雷达和IMU的紧耦合SLAM方法及系统.pdf
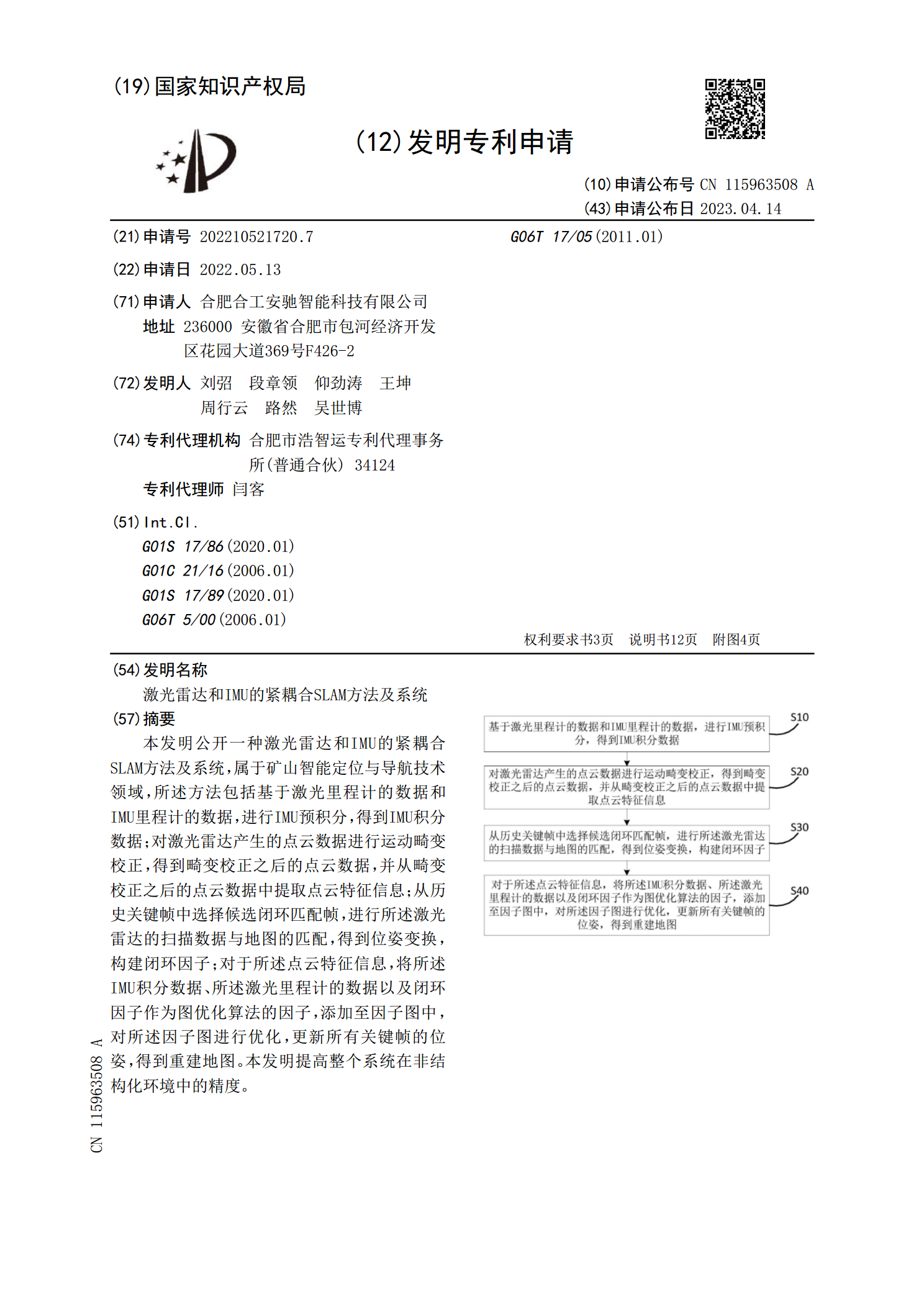
本发明公开一种激光雷达和IMU的紧耦合SLAM方法及系统,属于矿山智能定位与导航技术领域,所述方法包括基于激光里程计的数据和IMU里程计的数据,进行IMU预积分,得到IMU积分数据;对激光雷达产生的点云数据进行运动畸变校正,得到畸变校正之后的点云数据,并从畸变校正之后的点云数据中提取点云特征信息;从历史关键帧中选择候选闭环匹配帧,进行所述激光雷达的扫描数据与地图的匹配,得到位姿变换,构建闭环因子;对于所述点云特征信息,将所述IMU积分数据、所述激光里程计的数据以及闭环因子作为图优化算法的因子,添加至因子图

基于激光雷达的智能小车SLAM研究.docx
基于激光雷达的智能小车SLAM研究概述随着社会的快速发展,科技的不断进步和人们对智能化、自动化生活的需求不断增加,智能车小车得到了越来越多的关注。智能汽车小车在路面上行驶时,要实现自主感知环境、有效规划路径和自主导航以及不断完善的智能化系统算法,这其中一个重要的技术是激光雷达技术。激光雷达技术在汽车小车的自主驾驶和SLAM等技术的研究和应用中担当着重要的角色。论文主要围绕激光雷达技术在智能小车SLAM中的研究展开。首先介绍激光雷达技术的原理和应用,接着对SLAM技术进行解析,并阐述SLAM中使用激光雷达的
基于惯性导航角度补偿的室内激光SLAM方法.pptx
汇报人:/目录0102激光SLAM的基本原理室内激光SLAM的应用场景室内激光SLAM的挑战与解决方案03惯性导航系统的基本原理角度补偿在惯性导航系统中的作用角度补偿的方法与实现04方法概述角度补偿在激光SLAM中的具体应用方法优势与局限性分析05实验设置与数据采集实验结果展示与分析结果与现有方法的比较06研究结论对未来研究的建议与展望汇报人: