
无遮挡航拍四旋翼飞行器结构设计与仿真研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无遮挡航拍四旋翼飞行器结构设计与仿真研究.docx
无遮挡航拍四旋翼飞行器结构设计与仿真研究摘要:本文以无遮挡航拍四旋翼飞行器结构设计与仿真研究为题,探讨了航拍四旋翼飞行器的结构设计原理和仿真技术。通过分析四旋翼飞行器的设计需求和工作原理,提出了一种无遮挡航拍四旋翼飞行器的结构设计方案,并利用仿真软件进行了验证。结果表明,该设计方案在无遮挡的情况下,能够实现稳定的飞行和高质量的航拍效果。关键词:无遮挡航拍四旋翼飞行器,结构设计,仿真研究第一章:引言1.1研究背景随着航拍技术的飞速发展,无人机已经成为了航拍的主要工具之一。而四旋翼飞行器作为无人机的一种,由于

无遮挡航拍四旋翼飞行器结构设计与仿真研究的开题报告.docx
无遮挡航拍四旋翼飞行器结构设计与仿真研究的开题报告一、选题背景航拍无人机在近年来的快速发展中开始广泛应用于民用领域。特别是随着智能手机等移动设备的发展,更多人希望通过航拍摄像来记录他们的生活。在市场上,许多专业和业余的摄影师都希望能够使用更好的航拍无人机来提高他们拍摄的效果。因此,本文提出的无遮挡航拍四旋翼飞行器设计,具有市场前景和实际应用价值。二、选题意义无人机可以在垂直方向起降,并且能够在空中停留,因此它们可以通过哪些传统方法无法实现的角度捕捉有趣的场景。无人机拍摄图像的效果取决于飞行器的结构设计和工

四旋翼飞行器航拍控制系统的设计与仿真验证.docx
四旋翼飞行器航拍控制系统的设计与仿真验证四旋翼飞行器航拍控制系统的设计与仿真验证摘要:随着无人机技术的发展,四旋翼飞行器逐渐走进人们的视野。其灵活的悬停能力以及航拍功能使其成为航空摄影、地理测绘等领域的重要工具。本论文主要研究四旋翼飞行器的航拍控制系统设计与仿真验证。首先,介绍了四旋翼飞行器的工作原理以及航拍功能的基本要求。然后,详细描述了航拍控制系统的设计思路和流程,并给出了相应的数学模型。接下来,使用仿真工具对设计方案进行了验证,并对仿真结果进行了分析。最后,通过实际飞行测试对仿真结果进行了验证,并进
一种四旋翼航拍飞行器.pdf
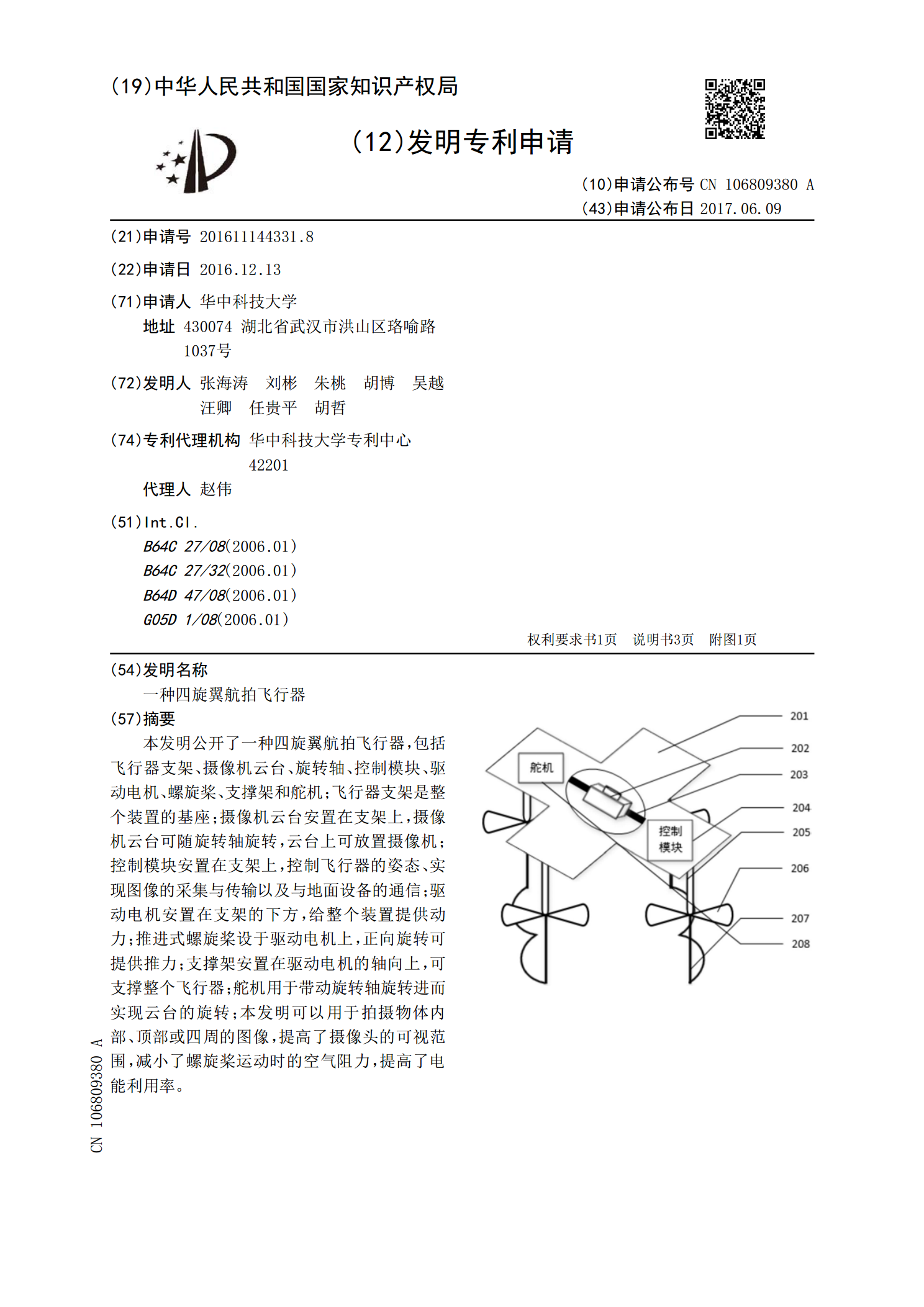
本发明公开了一种四旋翼航拍飞行器,包括飞行器支架、摄像机云台、旋转轴、控制模块、驱动电机、螺旋桨、支撑架和舵机;飞行器支架是整个装置的基座;摄像机云台安置在支架上,摄像机云台可随旋转轴旋转,云台上可放置摄像机;控制模块安置在支架上,控制飞行器的姿态、实现图像的采集与传输以及与地面设备的通信;驱动电机安置在支架的下方,给整个装置提供动力;推进式螺旋桨设于驱动电机上,正向旋转可提供推力;支撑架安置在驱动电机的轴向上,可支撑整个飞行器;舵机用于带动旋转轴旋转进而实现云台的旋转;本发明可以用于拍摄物体内部、顶部或

四旋翼飞行器航拍控制系统的设计与仿真验证的开题报告.docx
四旋翼飞行器航拍控制系统的设计与仿真验证的开题报告一、选题背景随着科技发展和无人机技术的不断成熟,航拍四旋翼飞行器越来越受到人们的关注。四旋翼飞行器作为一种具有垂直起降能力的无人机,能够在复杂地形和狭窄空间中飞行,具有优异的平稳性和灵活性,因此在实际应用中得到了广泛的应用。在航拍领域中,四旋翼飞行器可以拍摄出高质量的航拍照片和视频,为我们提供了新的视角和更多的信息。为了提高四旋翼飞行器的飞行控制精度和飞行稳定性,需要设计一套高效的控制系统,并对其进行仿真验证。本课题旨在针对四旋翼飞行器航拍领域中的问题,设