
桡骨远端骨折复位测力装置及智能固定护具的研制.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

桡骨远端骨折复位测力装置及智能固定护具的研制.docx
桡骨远端骨折复位测力装置及智能固定护具的研制标题:桡骨远端骨折复位测力装置及智能固定护具的研制摘要:桡骨远端骨折是常见的骨折类型,传统复位方法存在操作难度大、不稳定等问题。本文针对该问题,设计并研制了一种桡骨远端骨折复位测力装置及智能固定护具,旨在提高复位效果和治疗质量。该装置能够通过测力传感器对骨骼的复位力进行实时测量,并通过智能算法进行数据分析和处理,实现智能固定护具。经过初步实验验证,该装置和护具具有较好的骨折复位和固定效果,可望在临床上推广应用。关键词:桡骨远端骨折,复位测力装置,智能固定护具,预

桡骨远端骨折牵引复位固定支具.pdf
本发明公布了一种桡骨远端骨折牵引复位固定支具,通过牵引杆连接牵引手套和掌、背侧夹板,在骨折部位两端形成对抗牵引,从而达到骨折进一步复位和固定的效果,气囊和绒毛是创新的关键点,该设计使自体牵引得以实现,产生的效果是既能保持桡骨远端关节面高度,还能根据情况变化调整牵引方向,在维持复位的基础上允许腕关节及其以远各关节的活动,尽可能的保留了患者手部功能,从而保证康复效果。
一种桡骨远端骨折外固定康复护具.pdf
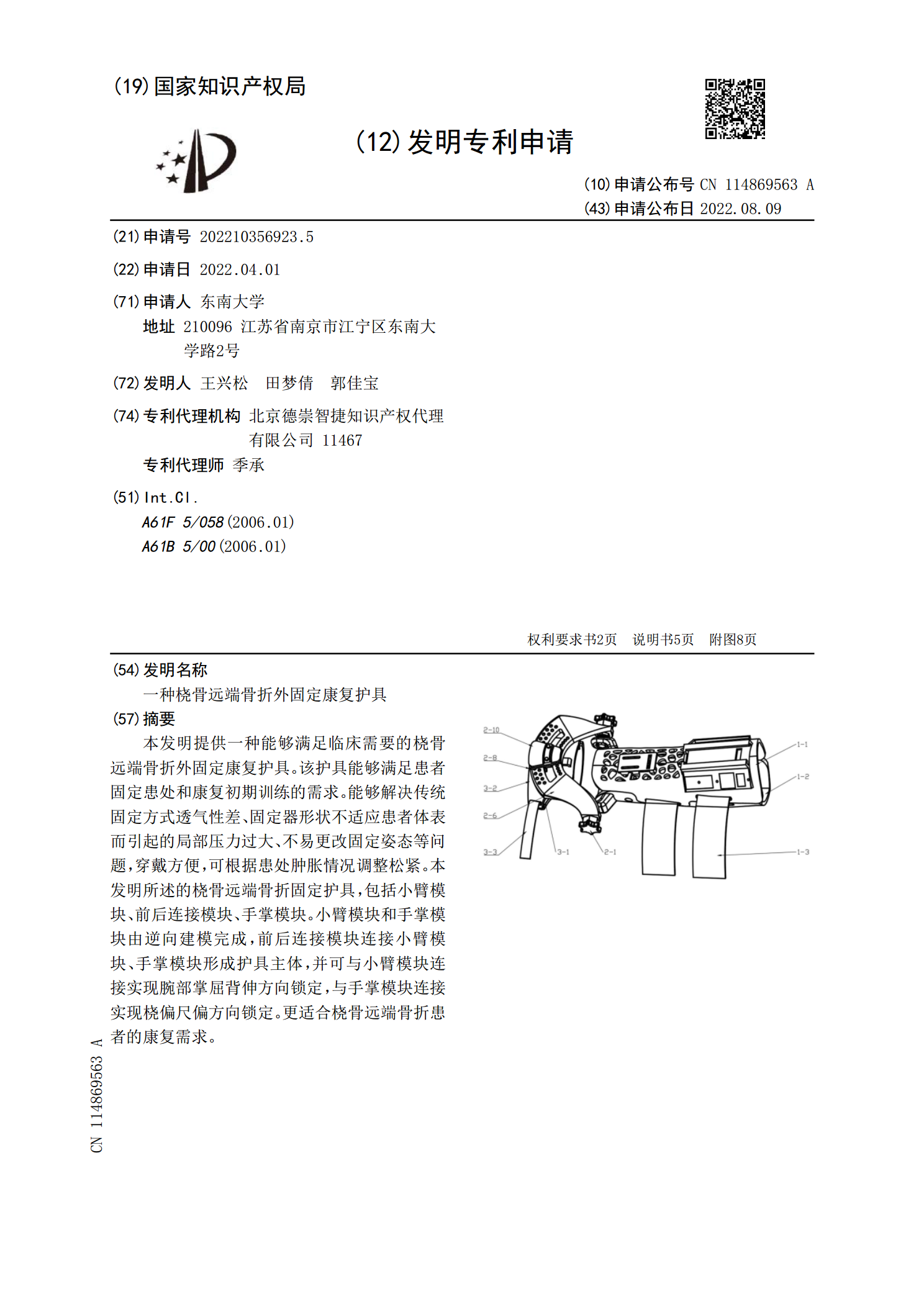
本发明提供一种能够满足临床需要的桡骨远端骨折外固定康复护具。该护具能够满足患者固定患处和康复初期训练的需求。能够解决传统固定方式透气性差、固定器形状不适应患者体表而引起的局部压力过大、不易更改固定姿态等问题,穿戴方便,可根据患处肿胀情况调整松紧。本发明所述的桡骨远端骨折固定护具,包括小臂模块、前后连接模块、手掌模块。小臂模块和手掌模块由逆向建模完成,前后连接模块连接小臂模块、手掌模块形成护具主体,并可与小臂模块连接实现腕部掌屈背伸方向锁定,与手掌模块连接实现桡偏尺偏方向锁定。更适合桡骨远端骨折患者的康复需

手法复位石膏托外固定治疗桡骨远端骨折.pdf
·54·(总294)中医正骨2011年4月第23卷第4期手法复位石膏托外固定治疗桡骨远端骨折魏璨琮,谭宗奎(中N/,-民解放军广州军区武汉总医院,湖北武汉430070)关键词桡骨骨折手法,整骨石膏,外科桡骨远端骨折是指桡骨远端关节面以上2~3cm挤压骨折块,使之复位,再将腕关节轻度掌屈,恢复关以内的骨折,临床较常见。2008年11月至2009年节面平整后,将患肢以石膏托固定于轻度掌屈尺偏前11月,我们采用手法复位石膏托外固定治疗桡骨远臂旋前位;对于背侧移位的Barton骨折,两拇指挤压端骨折患者478例,

手法复位小夹板固定治疗桡骨远端骨折临床观察.docx
手法复位小夹板固定治疗桡骨远端骨折临床观察作者:周三保林望得王新杰潘安男陈辉袁盛平【摘要】【目的】观察手法复位、小夹板固定治疗桡骨远端骨折的疗效。【方法】通过观察手法复位、小夹板固定治疗70例桡骨远端骨折病例的对位情况、肿胀消退时间、疼痛缓解时间、gw评分等指标评定疗效。【结果】手法复位、小夹板固定治疗桡骨远端骨折病例对位情况好复位后掌倾角、尺偏角均得到较好地改善。手背肿胀消退时间4~14d平均(6?0±1?6)d。局部自觉疼痛缓解时间3~10d平均(6?4±