
基于总体误差下降指标和MIQP模型的参数辨识方法研究.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于总体误差下降指标和MIQP模型的参数辨识方法研究.docx
基于总体误差下降指标和MIQP模型的参数辨识方法研究基于总体误差下降指标和MIQP模型的参数辨识方法研究摘要:在现实生活中,很多系统或模型的参数是未知的,参数辨识就是利用已知的观测数据来估计未知参数值的过程。本文基于总体误差下降指标和MixedIntegerQuadraticProgramming(MIQP)模型,研究了一种参数辨识方法。首先介绍了总体误差下降指标的概念和应用场景,然后详细介绍了MIQP模型的基本原理和求解方法。接着,我们提出了一种基于总体误差下降指标和MIQP模型的参数辨识算法,并对该算
基于分数阶梯度下降的液压缸模型参数辨识及补偿方法.pdf
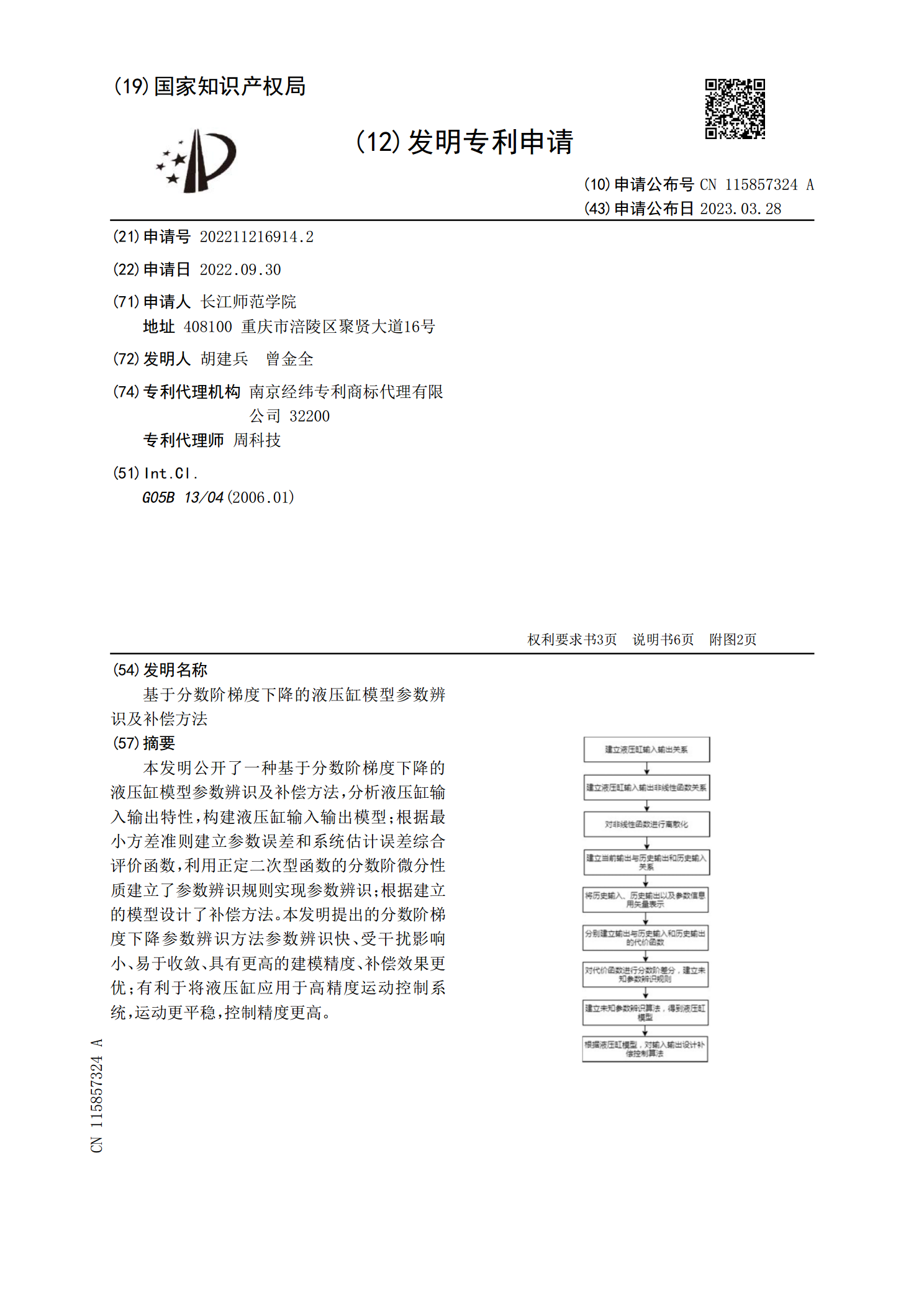
本发明公开了一种基于分数阶梯度下降的液压缸模型参数辨识及补偿方法,分析液压缸输入输出特性,构建液压缸输入输出模型;根据最小方差准则建立参数误差和系统估计误差综合评价函数,利用正定二次型函数的分数阶微分性质建立了参数辨识规则实现参数辨识;根据建立的模型设计了补偿方法。本发明提出的分数阶梯度下降参数辨识方法参数辨识快、受干扰影响小、易于收敛、具有更高的建模精度、补偿效果更优;有利于将液压缸应用于高精度运动控制系统,运动更平稳,控制精度更高。
基于ARMA模型的明变系统参数辨识方法研究.pptx
汇报人:CONTENTS添加章节标题研究背景和意义研究背景研究意义ARMA模型介绍ARMA模型定义ARMA模型特点ARMA模型应用领域明变系统参数辨识方法研究明变系统参数辨识方法概述基于ARMA模型的明变系统参数辨识方法参数辨识方法实现流程参数辨识方法优缺点分析实验设计和结果分析实验设计实验结果分析结果与讨论结论和展望研究结论研究不足与展望未来研究方向汇报人:

基于距离误差的机器人参数辨识模型与冗余性分析.docx
基于距离误差的机器人参数辨识模型与冗余性分析基于距离误差的机器人参数辨识模型与冗余性分析摘要:机器人参数辨识是机器人控制领域的关键技术之一。本文提出了一种基于距离误差的机器人参数辨识模型,并对其进行了冗余性分析。分析结果表明,该模型能够有效地辨识机器人的不确定参数,并具有较好的冗余性能。该研究对于机器人控制算法的优化和提升具有重要的理论和实践意义。关键词:机器人;参数辨识;距离误差;冗余性分析1.引言随着机器人技术的不断发展,机器人已广泛应用于工业制造、农业生产、医疗护理等领域。在机器人控制中,准确获得机

基于Lugre摩擦模型的参数辨识装置及方法.pdf
本发明公开一种基于Lugre摩擦模型的参数辨识装置及方法。其中方法包括创建配置有Lugre摩擦模型的PID闭环控制系统,绘制输出转速w和摩擦力矩F<base:Sub>fric</base:Sub>的第一特征曲线;根据第一特征曲线辨识摩擦力矩F<base:Sub>fric</base:Sub>的库伦摩擦力及stribeck速度;获取伺服电机输入的峰值电压Umax;在伺服电机输入一速度极缓慢变化的辨识电压,辨识电压在先从一初始电压上升到峰值电压Umax,在后从峰值电压Umax下降到负数的峰值电压Umax;获取