
基于麦克纳姆轮的智能小车SLAM导航研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于麦克纳姆轮的智能小车SLAM导航研究.docx
基于麦克纳姆轮的智能小车SLAM导航研究摘要:随着自动化技术的发展,智能小车已经在工业、商业、教育等领域得到广泛的应用。智能小车作为一种移动机器人,需要在未知环境中进行建图和导航,这就需要使用SLAM技术实现。本文基于麦克纳姆轮智能小车,研究SLAM导航技术,探讨了麦克纳姆轮在导航过程中的优势和特点。通过对该技术的研究和实验验证,可以为智能小车的研发和应用提供有益的参考。关键词:智能小车,麦克纳姆轮,SLAM,导航技术引言:近些年来,随着自动化技术的发展,智能小车作为一种重要的移动机器人得到了广泛的应用。
基于麦克纳姆轮WIFI视频智能小车.pdf
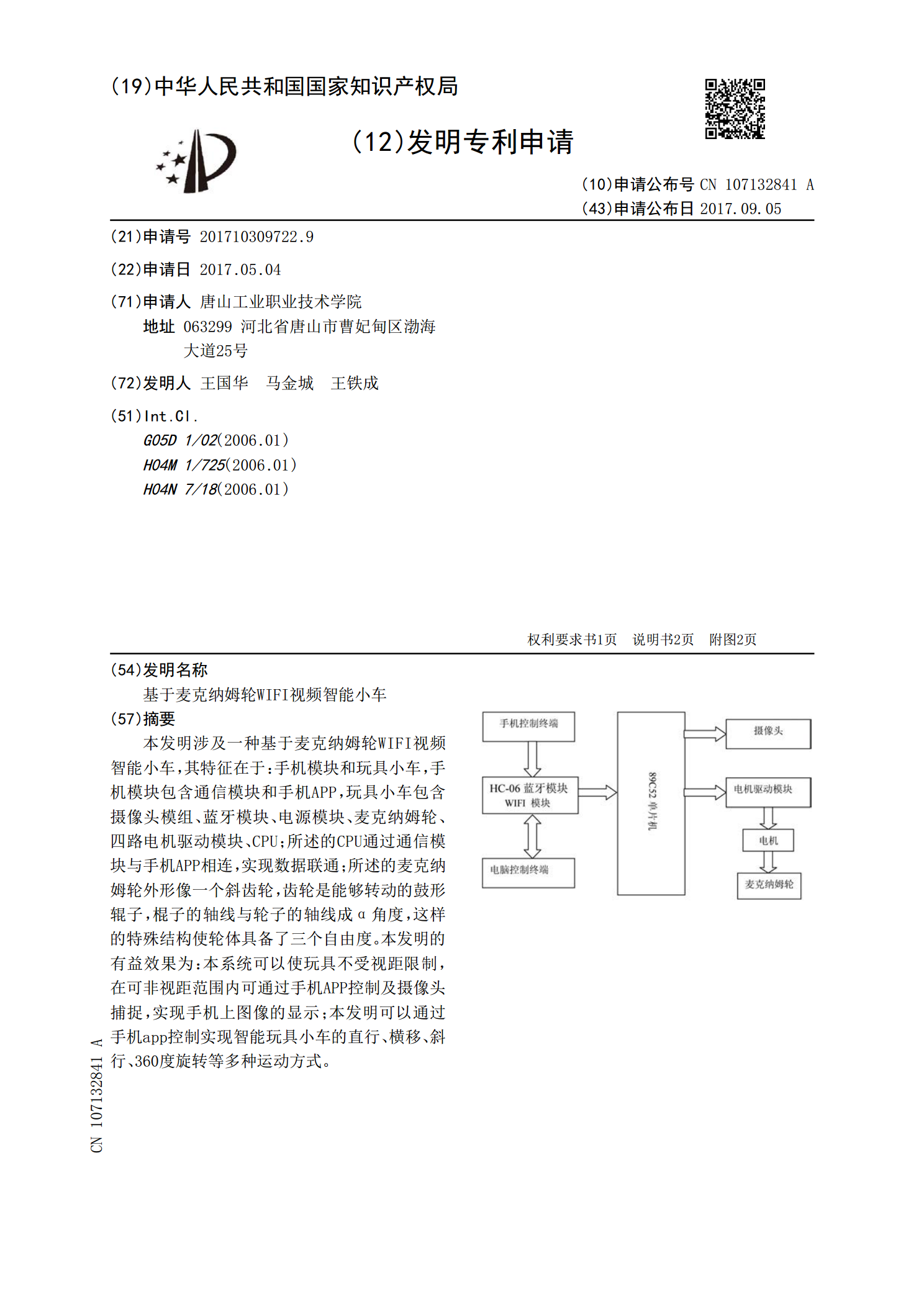
本发明涉及一种基于麦克纳姆轮WIFI视频智能小车,其特征在于:手机模块和玩具小车,手机模块包含通信模块和手机APP,玩具小车包含摄像头模组、蓝牙模块、电源模块、麦克纳姆轮、四路电机驱动模块、CPU;所述的CPU通过通信模块与手机APP相连,实现数据联通;所述的麦克纳姆轮外形像一个斜齿轮,齿轮是能够转动的鼓形辊子,棍子的轴线与轮子的轴线成α角度,这样的特殊结构使轮体具备了三个自由度。本发明的有益效果为:本系统可以使玩具不受视距限制,在可非视距范围内可通过手机APP控制及摄像头捕捉,实现手机上图像的显示;本发

基于麦克纳姆轮的室内自主搬运小车.docx
基于麦克纳姆轮的室内自主搬运小车标题:基于麦克纳姆轮的室内自主搬运小车摘要:随着科技的迅猛发展,机器人技术在许多领域得到了广泛应用。本论文旨在介绍基于麦克纳姆轮的室内自主搬运小车的设计和实现。该小车采用了麦克纳姆轮的运动原理,具有良好的操控性和灵活性,能够在室内环境中自主完成搬运任务。通过对该小车的设计过程和关键技术进行详细阐述,展示了基于麦克纳姆轮的室内自主搬运小车的潜在应用价值。1.引言随着现代物流和仓储行业的不断发展,对于自动化、智能化搬运设备的需求越来越高。而基于麦克纳姆轮的室内自主搬运小车正好能

基于麦克纳姆轮的磁导航AGV纠偏控制研究.docx
基于麦克纳姆轮的磁导航AGV纠偏控制研究基于麦克纳姆轮的磁导航AGV纠偏控制研究摘要现代物流行业对于自动化物流系统的需求越来越高,自动导引车(AutomatedGuidedVehicle,AGV)是其中重要的一种机器人。麦克纳姆轮是一种常用于AGV的轮子设计,其独特的轮子排列方式使得车辆能够实现平稳的运动和旋转。本文针对基于麦克纳姆轮的磁导航AGV在运行过程中可能出现的纠偏问题进行了深入研究,提出了一种有效的纠偏控制方法。关键词:自动导引车,麦克纳姆轮,磁导航,纠偏控制1.引言自动导引车(Automate

基于麦克纳姆轮的磁导航自动导引车模糊控制.docx
基于麦克纳姆轮的磁导航自动导引车模糊控制基于麦克纳姆轮的磁导航自动导引车模糊控制摘要:随着自动化技术的迅速发展,自动导引车在工业和物流领域中得到了广泛的应用。本文提出了一种基于麦克纳姆轮的磁导航自动导引车模糊控制方法,以实现精确的路径跟踪和目标定位。该方法利用磁传感器测量车辆周围的磁场,通过模糊控制算法对车辆的速度和转向进行实时调节,使得车辆能够准确地遵循预定路径,并在目标点上停靠。实验结果表明,该方法能够有效地提高自动导引车的导航精度和稳定性。关键词:麦克纳姆轮;磁导航;自动导引车;模糊控制第一章引言自