
基于车载毫米波雷达的目标检测CFAR算法研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于车载毫米波雷达的目标检测CFAR算法研究.pptx
汇报人:CONTENTSPARTONEPARTTWO毫米波雷达的工作原理毫米波雷达的优势和应用场景车载毫米波雷达的发展现状PARTTHREECFAR算法的基本原理CFAR算法在目标检测中的应用当前CFAR算法的研究进展和挑战PARTFOUR算法设计思路和流程实验环境和数据集实验结果分析和比较PARTFIVE算法性能优化的方向和策略基于深度学习的CFAR算法改进实验验证和性能评估PARTSIX研究成果总结未来研究方向和展望汇报人:

基于车载毫米波雷达的目标检测CFAR算法研究.docx
基于车载毫米波雷达的目标检测CFAR算法研究随着汽车工业的不断发展,车载毫米波雷达技术已经成为实现智能驾驶、防碰撞和自动停车等关键技术之一。而目标检测作为其中重要组成部分,对于提高车辆安全性能和驾驶体验具有至关重要的作用。然而,由于车载毫米波雷达的特殊性质,目标检测难度较大。因此,本文针对基于车载毫米波雷达的目标检测问题,研究了CFAR算法,旨在提高目标检测的准确性和鲁棒性。一、车载毫米波雷达简介车载毫米波雷达是一种能够使用毫米波频段进行精确定位和距离测量的雷达系统。它能够很好地穿透雨雾、尘土、雪等障碍物

车载毫米波雷达目标检测与定位技术研究.docx
车载毫米波雷达目标检测与定位技术研究车载毫米波雷达目标检测与定位技术研究摘要:车载毫米波雷达是一种利用毫米波频段进行探测和定位的雷达系统,具有较高的分辨率和适应性,尤其在低能见度环境下具有独特的优势。本文针对车载毫米波雷达目标检测与定位技术进行了深入研究,包括毫米波信号特性、目标检测算法、目标跟踪算法以及定位方法等方面。通过实验验证,证明了车载毫米波雷达在车辆安全与自动驾驶等领域的重要性。关键词:车载毫米波雷达、目标检测、目标定位、低能见度、自动驾驶1.引言近年来,随着自动驾驶技术的快速发展,车载传感器在

基于车载毫米波雷达的多目标检测方法和系统.pdf
本发明涉及目标检测技术领域,提供一种基于车载毫米波雷达的多目标检测方法和系统。方法包括:根据状态模型构建多目标检测的状态转移函数;根据量测模型构建多目标检测的似然函数;以所述多目标观测集合为输入量,通过粒子滤波器得到多目标检测结果;所述粒子滤波器是基于所述状态转移函数和所述似然函数构建的。本发明通过随机有限集框架下的状态转移函数和似然函数构建粒子滤波器,能够有效避免滤波过程中由于数据关联产生的干扰,从而使得多目标检测任务在具有杂波和误检的场景下,仍然可以得到准确的检测结果。
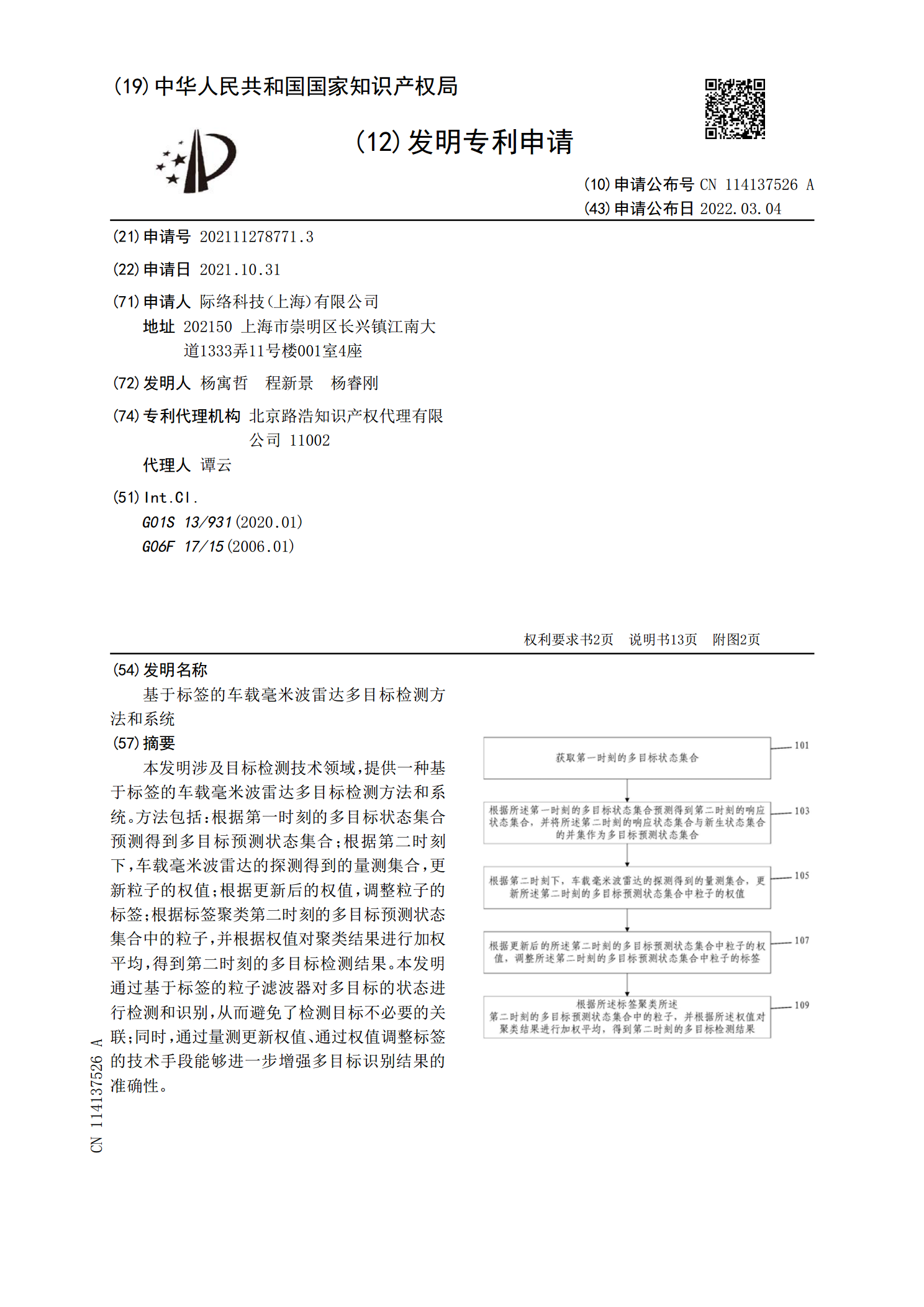
基于标签的车载毫米波雷达多目标检测方法和系统.pdf
本发明涉及目标检测技术领域,提供一种基于标签的车载毫米波雷达多目标检测方法和系统。方法包括:根据第一时刻的多目标状态集合预测得到多目标预测状态集合;根据第二时刻下,车载毫米波雷达的探测得到的量测集合,更新粒子的权值;根据更新后的权值,调整粒子的标签;根据标签聚类第二时刻的多目标预测状态集合中的粒子,并根据权值对聚类结果进行加权平均,得到第二时刻的多目标检测结果。本发明通过基于标签的粒子滤波器对多目标的状态进行检测和识别,从而避免了检测目标不必要的关联;同时,通过量测更新权值、通过权值调整标签的技术手段能够