
多无人机协同监测Ad-Hoc网络组网方法研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多无人机协同监测Ad-Hoc网络组网方法研究.docx
多无人机协同监测Ad-Hoc网络组网方法研究随着无人机技术的不断发展和普及,无人机的应用范围也越来越广泛,其中监测和巡逻任务是最为常见的应用之一。在实际应用中,多架无人机往往需要协同工作才能完成监测任务,因此无人机之间的协同通信成为了至关重要的问题。本文就多无人机协同监测Ad-Hoc网络组网方法进行研究和探讨。1.Ad-Hoc网络的定义和特点Ad-Hoc网络是指在没有任何基础设施支持的情况下,多个移动节点之间建立起来的点对点(P2P)连接网络。Ad-Hoc网络的一个重要特点就是它能够在没有任何行政控制的情

多无人机对组网雷达的协同干扰问题研究.pptx
多无人机对组网雷达的协同干扰问题研究目录添加目录项标题多无人机对组网雷达协同干扰问题的背景无人机技术的发展组网雷达在现代战争中的作用协同干扰在电子战中的重要性研究问题的提出多无人机对组网雷达协同干扰的理论基础协同干扰的基本原理无人机干扰技术的原理及特点组网雷达的工作原理及抗干扰能力协同干扰在电子战中的优势与挑战多无人机对组网雷达协同干扰的实现方法协同干扰的总体设计无人机的干扰策略与实施组网雷达的抗干扰策略协同干扰效果的评估方法多无人机对组网雷达协同干扰的实验验证实验场景设计与构建实验过程与数据分析实验结果

多无人机协同空战决策方法研究的中期报告.docx
多无人机协同空战决策方法研究的中期报告本项目旨在研究多无人机协同空战决策方法,本中期报告主要介绍已完成的研究内容及进展情况。1.研究背景和意义随着无人机技术的不断发展,无人机在军事领域中扮演着越来越重要的角色。无人机进行空中任务时,通常需要与其他无人机进行协同工作,以同时完成多个任务,具有优异的任务协同效应。在无人机协同作战中,如何实现有效的空中决策是关键问题之一。有效的决策能够通过优化无人机的路径规划、任务分配以及空中防御等策略来提高决策效能。2.已有工作概述目前,已有大量关于无人机协同作战的研究工作。

面向动态目标的多无人机协同搜索方法研究.docx
面向动态目标的多无人机协同搜索方法研究随着无人机应用在多个领域的普及,无人机相关技术也在不断地发展。在无人机协同搜索领域,传统的多无人机搜索方法没有充分考虑到目标的动态性,而面向动态目标的多无人机协同搜索方法可以更加高效地完成搜索任务。一、传统多无人机搜索方法的缺陷传统的多无人机搜索方法通常采用固定模式的搜索方式,安排无人机在搜索范围内按照规定的路径进行搜索,或者对整个搜索区域进行网格化划分搜索。但这种做法存在以下问题:1.无法有效应对动态目标的搜索在一个飞行速度较慢的固定模式下进行搜索时,难以快速跟踪动
多无人机协同控制方法和装置.pdf
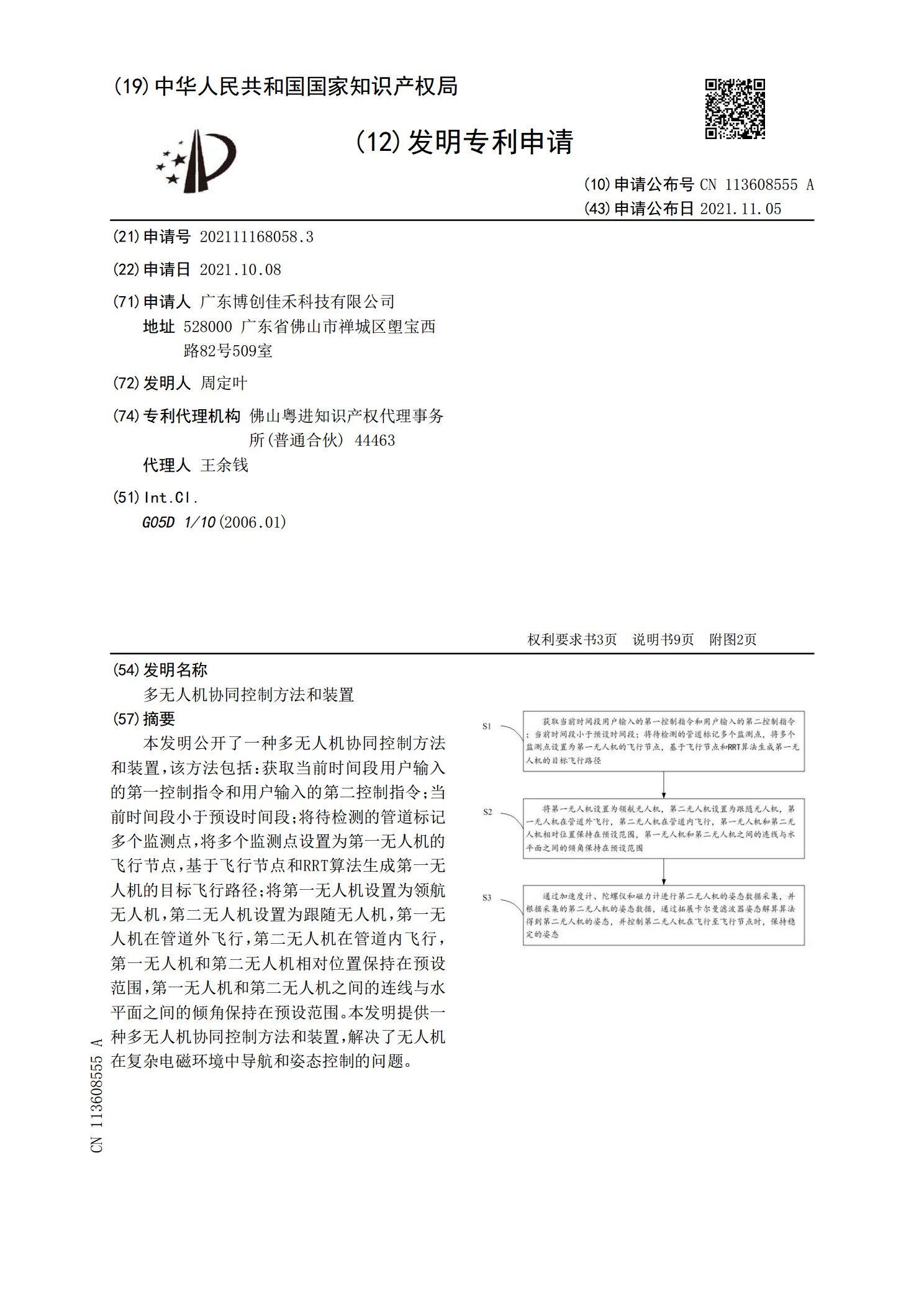
本发明公开了一种多无人机协同控制方法和装置,该方法包括:获取当前时间段用户输入的第一控制指令和用户输入的第二控制指令;当前时间段小于预设时间段;将待检测的管道标记多个监测点,将多个监测点设置为第一无人机的飞行节点,基于飞行节点和RRT算法生成第一无人机的目标飞行路径;将第一无人机设置为领航无人机,第二无人机设置为跟随无人机,第一无人机在管道外飞行,第二无人机在管道内飞行,第一无人机和第二无人机相对位置保持在预设范围,第一无人机和第二无人机之间的连线与水平面之间的倾角保持在预设范围。本发明提供一种多无人机协