
多智能体动态目标协同搜索策略研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多智能体动态目标协同搜索策略研究.docx
多智能体动态目标协同搜索策略研究多智能体动态目标协同搜索策略研究随着智能化时代的到来和社会的发展,越来越多的问题需要在动态环境下解决,其中多智能体系统的问题尤为突出。多智能体系统中,不同个体需要协同完成任务,即便一个个体能够完成任务,其效率也会受到局限。因此,如何让多个智能体协同完成任务成为一个亟待解决的问题。在多智能体系统中,动态目标的协同搜索能力尤为重要,本文将深入研究多智能体动态目标协同搜索策略。一、关于多智能体动态目标协同搜索多智能体系统中协同搜索是指多个智能体同时在同一环境中搜索目标。动态目标是
一种多智能体目标协同搜索方法及系统.pdf
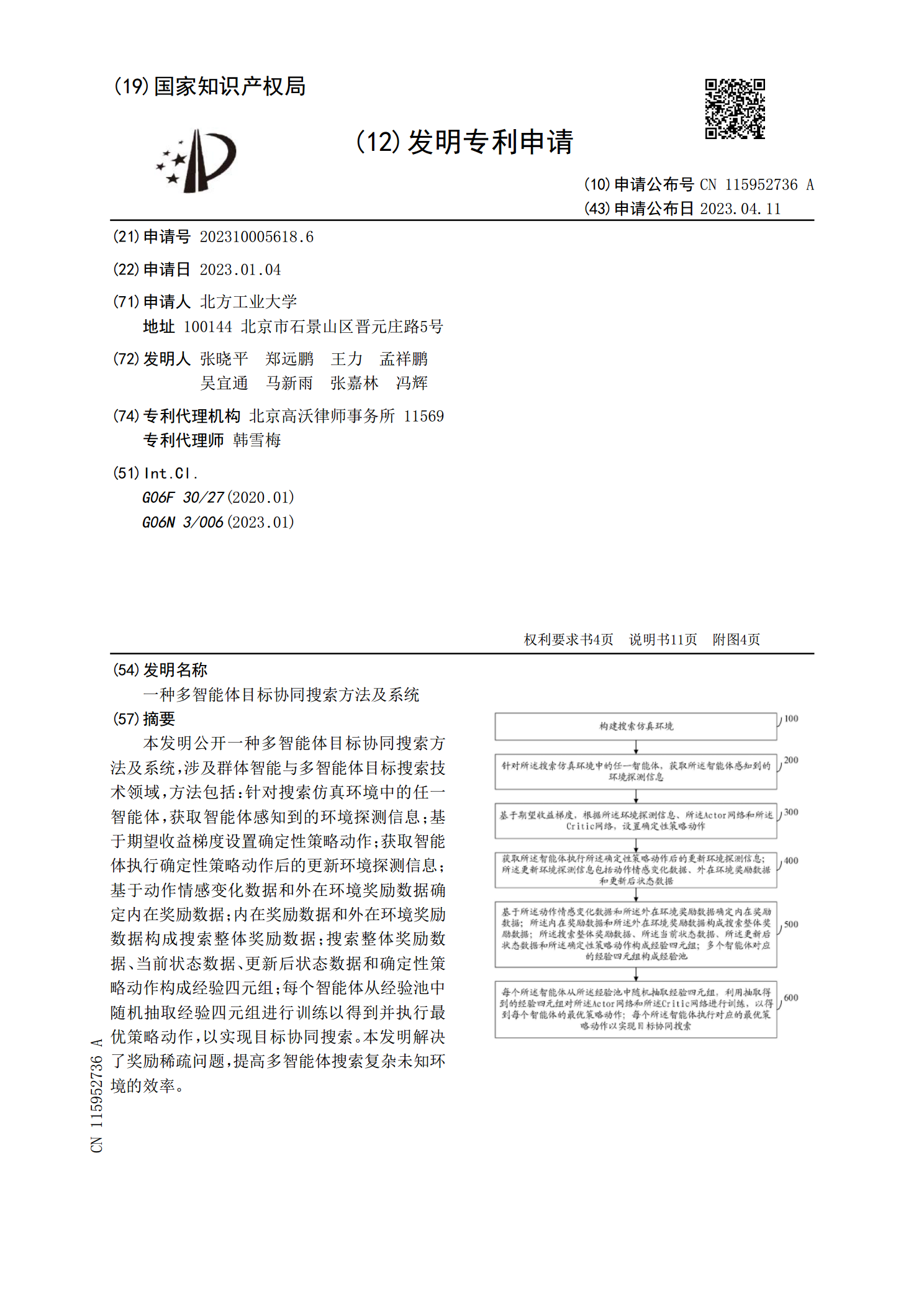
本发明公开一种多智能体目标协同搜索方法及系统,涉及群体智能与多智能体目标搜索技术领域,方法包括:针对搜索仿真环境中的任一智能体,获取智能体感知到的环境探测信息;基于期望收益梯度设置确定性策略动作;获取智能体执行确定性策略动作后的更新环境探测信息;基于动作情感变化数据和外在环境奖励数据确定内在奖励数据;内在奖励数据和外在环境奖励数据构成搜索整体奖励数据;搜索整体奖励数据、当前状态数据、更新后状态数据和确定性策略动作构成经验四元组;每个智能体从经验池中随机抽取经验四元组进行训练以得到并执行最优策略动作,以实现

基于多智能体粒子群的协同空战目标决策研究.docx
基于多智能体粒子群的协同空战目标决策研究基于多智能体粒子群的协同空战目标决策研究摘要:随着现代战争的发展,空战目标决策成为空战指挥的重要环节。本文基于多智能体粒子群算法,探讨了如何实现协同空战目标决策。首先,介绍了空战目标决策的背景和重要性,然后详细阐述了多智能体粒子群的原理和算法流程,并给出了具体的应用案例。最后,通过实验验证了多智能体粒子群算法在协同空战目标决策中的有效性。关键词:空战目标决策,多智能体系统,粒子群算法,协同作战引言:空战目标决策是指在空中作战中,根据信息获取和分析,制定出合理的打击目

多类型目标的协同搜索方法研究.docx
多类型目标的协同搜索方法研究随着现代信息技术的不断发展,数据量和信息种类的快速增长使得传统的单一目标搜索类型已经无法满足机器人、无人驾驶等多领域的需求。针对这些领域中的多种目标的需求,需要研究一种能够进行多类型目标的协同搜索的方法。这种方法能够应对不同类型目标之间复杂的关系,准确地完成多类型目标的搜索任务。一、多类型目标的定义和分类多类型目标指的是在一个搜索任务中出现了不同类型的目标。根据目标所属领域和特性,可以将多类型目标分为以下几类:1.地理数据:这类目标通常是指地理位置和空间数据,例如人工构建的地图

基于博弈和多智能体的汽车共享服务联盟协同策略研究.pptx
汇报人:目录PARTONEPARTTWO汽车共享服务的发展现状汽车共享服务联盟的必要性博弈和多智能体在协同策略中的作用PARTTHREE博弈论:研究决策者在策略互动中的最优决策问题参与者:决策者,也称为博弈者策略:参与者可以选择的行动方案收益:参与者采取策略后获得的收益或损失均衡:所有参与者的最优策略组合,使得没有参与者愿意单方面改变策略纳什均衡:一种特殊的均衡,满足所有参与者的最优策略组合,且没有参与者愿意单方面改变策略囚徒困境:一种典型的博弈问题,两个参与者在信息不对称的情况下,无法达成最优策略组合重