
基于trot步态的四足机器人直线与转弯运动研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于trot步态的四足机器人直线与转弯运动研究.docx
基于trot步态的四足机器人直线与转弯运动研究摘要:基于trot步态的四足机器人是目前四足机器人中最常见的一种,其特点是稳定性强,适应性广。本文主要研究四足机器人在直线与转弯运动中的应用,讨论其运动规划、控制与优化技术等方面。通过实验验证,证明了采用trot步态的四足机器人能够实现稳定的直线运动和准确的转弯操作。关键词:四足机器人,trot步态,直线运动,转弯运动,运动规划,控制技术,优化技术正文:一、引言四足机器人是一种模仿动物行为的智能机器人,其应用范围广泛,包括空间探索、灾难救援、军事侦察、工业生产

四足机器人侧摆型trot步态的运动学分析及仿真研究.pptx
汇报人:/目录01步态定义与特性侧摆型trot步态的起源和原理侧摆型trot步态的应用场景02运动学基本概念侧摆型trot步态的运动学模型运动学参数分析运动学仿真验证03仿真研究的目的和意义仿真模型的建立与验证仿真实验设计与实施仿真结果分析与讨论04优化目标与策略改进方案设计与实施改进效果评估与验证05技术发展趋势与挑战未来研究方向与应用前景对行业发展的影响与贡献汇报人:
一种四足机器人基于trot步态的平衡控制算法.pdf
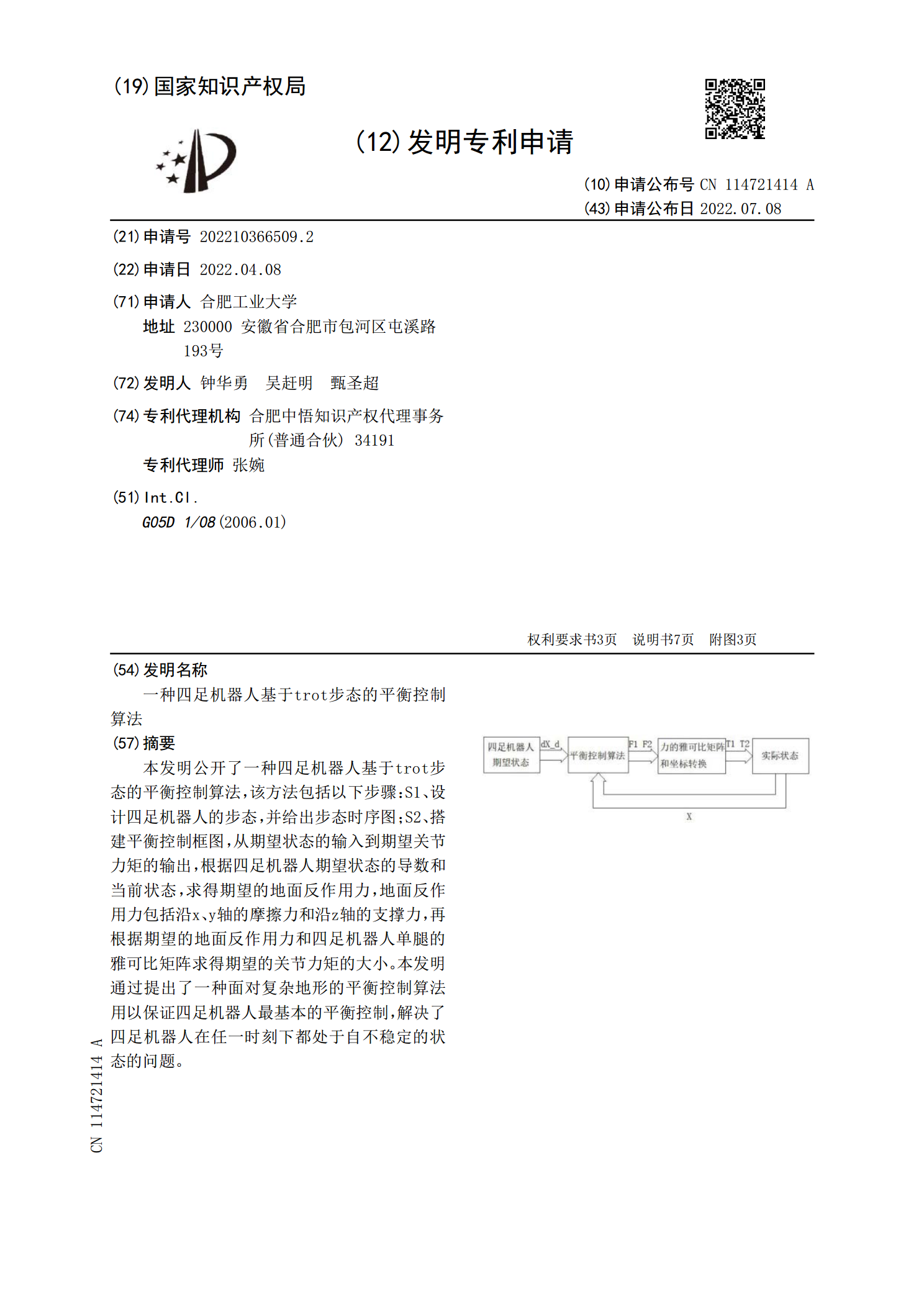
本发明公开了一种四足机器人基于trot步态的平衡控制算法,该方法包括以下步骤:S1、设计四足机器人的步态,并给出步态时序图;S2、搭建平衡控制框图,从期望状态的输入到期望关节力矩的输出,根据四足机器人期望状态的导数和当前状态,求得期望的地面反作用力,地面反作用力包括沿x、y轴的摩擦力和沿z轴的支撑力,再根据期望的地面反作用力和四足机器人单腿的雅可比矩阵求得期望的关节力矩的大小。本发明通过提出了一种面对复杂地形的平衡控制算法用以保证四足机器人最基本的平衡控制,解决了四足机器人在任一时刻下都处于自不稳定的状态

四足机器人Trot步态下抗外扰控制策略研究.pptx
四足机器人Trot步态下抗外扰控制策略研究目录添加章节标题研究背景与意义机器人技术发展现状四足机器人研究的重要性抗外扰控制策略研究的必要性四足机器人Trot步态概述Trot步态的特点与优势四足机器人的运动学与动力学模型Trot步态的实现方式抗外扰控制策略研究外扰因素对四足机器人的影响现有抗外扰控制策略分析新型抗外扰控制策略设计策略验证与实验结果分析实验结果与性能评估实验设置与条件实验结果展示与分析与其他控制策略的对比分析四足机器人性能评估与讨论结论与展望研究成果总结对未来研究的建议与展望THANKYOU

四足机器人Trot步态下抗外扰控制策略研究的任务书.docx
四足机器人Trot步态下抗外扰控制策略研究的任务书任务书一、选题背景四足机器人是一种能够模拟动物步态进行行走的机器人,其结构和机械特性决定了其在不平静的环境中表现出较好的适应性。但是,在实际应用中,四足机器人仍然会受到外界环境的干扰,对其步态和控制带来不利影响。针对这一问题,需要开展四足机器人Trot步态下抗外扰控制策略研究,以便在实际运用中提高其稳定性、可靠性和适应性。二、任务目标1.掌握四足机器人Trot步态的步态原理和控制技术;2.了解四足机器人受外界干扰的类型和影响;3.优化Trot步态控制算法,