
一种基于工具坐标系的机器人运动学参数标定方法.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于工具坐标系的机器人运动学参数标定方法.docx
一种基于工具坐标系的机器人运动学参数标定方法摘要:机器人运动学参数标定是机器人控制领域的重要研究内容之一。本文针对一种基于工具坐标系的机器人运动学参数标定方法进行研究,主要介绍了这种方法的研究背景、原理、步骤和应用等方面的内容。通过实验证明了这种方法的有效性,能够提高机器人运动的精度和稳定性,具有很好的应用前景。关键词:机器人运动学参数标定、工具坐标系、标定方法、应用1.引言机器人技术在现代工业、医学、航空航天等领域中得到了广泛的应用。机器人运动学参数标定是机器人控制领域的核心技术之一,是实现机器人精度控

基于距离误差的机器人运动学参数标定方法.docx
基于距离误差的机器人运动学参数标定方法基于距离误差的机器人运动学参数标定方法摘要:机器人运动学参数的准确标定对于实现精确控制和路径规划至关重要。传统的标定方法主要基于测量关节角度和末端执行器位置的误差,但这些方法需要使用昂贵的传感器,并且可能受到传感器误差和测量噪声的影响。本文提出了一种基于距离误差的机器人运动学参数标定方法,通过测量末端执行器位置误差和预测位置之间的距离差异来实现参数标定。实验结果表明,该方法能够在保持较高精度的同时降低成本和复杂性。关键词:机器人运动学,参数标定,距离误差。1.引言机器
一种基于视觉的多足机器人运动学参数标定方法.pdf
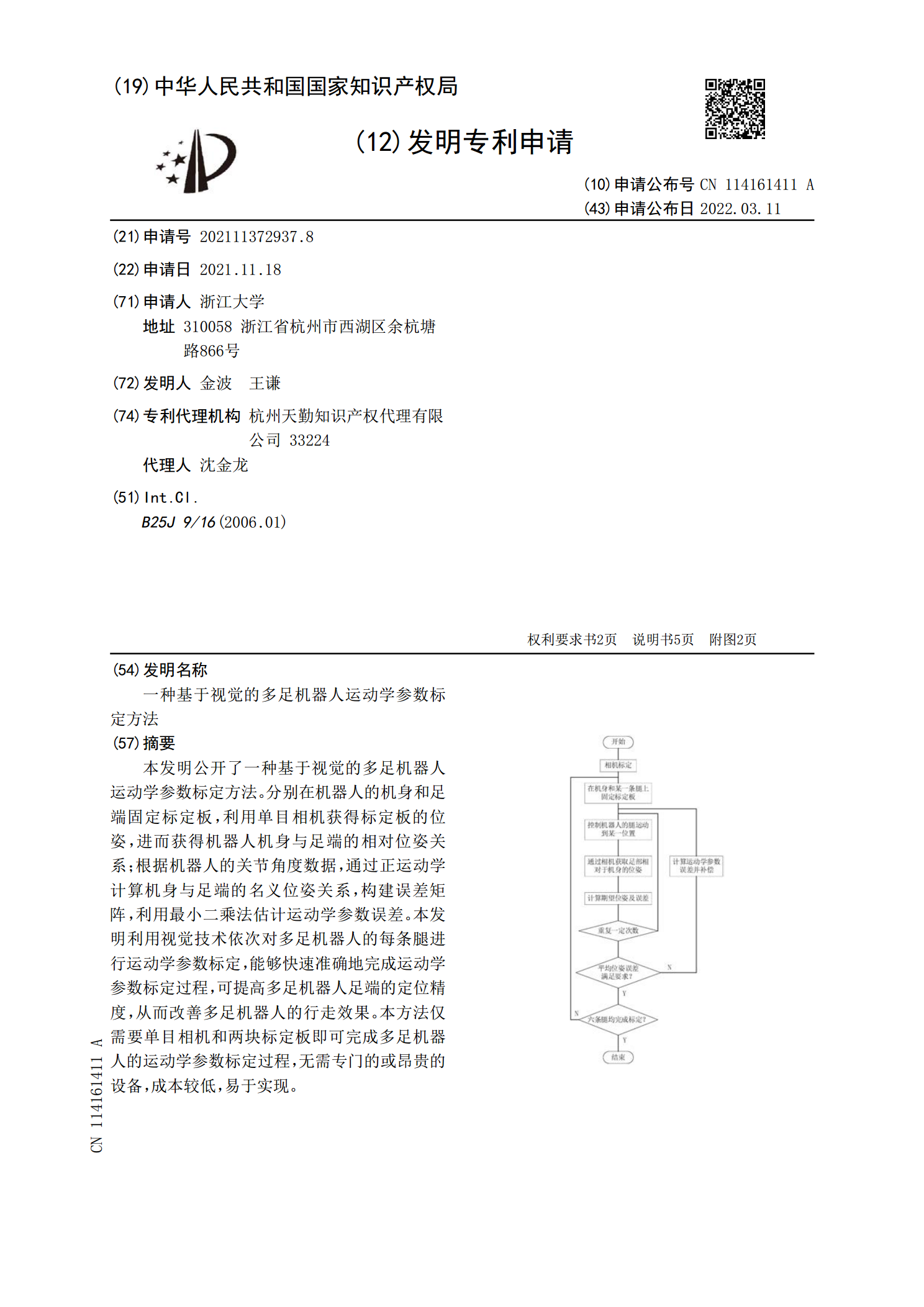
本发明公开了一种基于视觉的多足机器人运动学参数标定方法。分别在机器人的机身和足端固定标定板,利用单目相机获得标定板的位姿,进而获得机器人机身与足端的相对位姿关系;根据机器人的关节角度数据,通过正运动学计算机身与足端的名义位姿关系,构建误差矩阵,利用最小二乘法估计运动学参数误差。本发明利用视觉技术依次对多足机器人的每条腿进行运动学参数标定,能够快速准确地完成运动学参数标定过程,可提高多足机器人足端的定位精度,从而改善多足机器人的行走效果。本方法仅需要单目相机和两块标定板即可完成多足机器人的运动学参数标定过程

一种机器人工具坐标系标定方法.docx
一种机器人工具坐标系标定方法标题:一种基于传感器信息融合的机器人工具坐标系标定方法摘要:在机器人应用中,精确的工具坐标系标定是实现精准操作和路径规划的关键。本文提出了一种基于传感器信息融合的机器人工具坐标系标定方法。该方法利用机器人自身携带的传感器,通过测量工具与机器人基座之间的关系,实现工具坐标系的精确标定。通过传感器的数据融合技术,能够有效减少传感器误差并提高标定结果的准确性。实验结果表明,所提出的方法能够快速、准确地完成机器人工具坐标系标定任务。关键词:机器人;工具坐标系;标定;传感器信息融合1.引

基于激光跟踪仪的机器人运动学参数标定方法.pdf
第40卷第2期天津大学学报Vol.40No.22007年2月JournalofTianjinUniversityFeb.2007基于激光跟踪仪的机器人运动学参数标定方法叶声华,王一,任永杰,李定坤(天津大学精密测试技术及仪器国家重点实验室,天津300072)摘要:工业机器人的连杆参数误差是影响其绝对定位精度的最主要因素,为改善机器人的绝对定位精度,借助了高精度且可以实现绝对坐标测量的先进测量仪器———激光跟踪仪,以及功能强大的CAM2Measure4.0配套软件,从机器人自身的运动约束出发,构建起实际的D