
下肢康复外骨骼机器人感知与交互方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

下肢康复外骨骼机器人感知与交互方法研究.docx
下肢康复外骨骼机器人感知与交互方法研究题目:下肢康复外骨骼机器人感知与交互方法研究摘要:外骨骼机器人已被广泛应用于下肢康复领域,以帮助康复患者恢复运动功能。然而,为了实现有效的康复训练,外骨骼机器人需要准确地感知用户的运动意图并进行适当的交互。本论文针对下肢康复外骨骼机器人的感知与交互问题展开研究,介绍了感知方法和交互技术的最新研究进展,并探讨了未来的发展方向。1.引言下肢康复外骨骼机器人作为一种新型康复设备,可以提供力量辅助、运动支持和姿势控制等功能,帮助患者进行康复训练并恢复运动能力。然而,为了使外骨

下肢外骨骼机器人控制的脑电感知方法研究.docx
下肢外骨骼机器人控制的脑电感知方法研究摘要本文针对下肢外骨骼机器人控制的脑电感知方法进行研究。首先介绍了下肢外骨骼机器人和脑机接口技术的基础知识。然后,探讨了脑电信号的获取和处理方法,并分析了不同的脑电信号特征对下肢外骨骼机器人控制的影响。最后,介绍了一种基于谱分析的脑电感知方法,并对其进行了实验验证。关键词:下肢外骨骼机器人,脑机接口,脑电信号,谱分析AbstractThispaperinvestigatesthebrain-computerinterfacemethodforcontrollinglo

下肢康复外骨骼机器人步态相位切换研究.docx
下肢康复外骨骼机器人步态相位切换研究随着人口老龄化的加剧和人们健康意识的不断提高,下肢康复外骨骼机器人逐渐成为了许多人关注的焦点。它的出现不仅可以帮助行动不便的患者恢复自主行走能力,还可以对康复过程进行有效的监控和辅助。目前,机器人外骨骼的技术已经相当成熟,许多研究已经着手解决外骨骼在实际运动中的应用问题。其中,步态相位切换是康复外骨骼机器人设计中的一个重要部分,是机器人能否稳定、准确地执行康复训练任务的关键因素。步态相位切换是指机器人在行走时,根据人体生理特点和不同步态阶段的特征,对电机控制系统发出不同

下肢外骨骼康复机器人在脑卒中康复中的应用研究.docx
下肢外骨骼康复机器人在脑卒中康复中的应用研究标题:下肢外骨骼康复机器人在脑卒中康复中的应用研究摘要:脑卒中是一种常见的中枢神经系统疾病,它会导致下肢肌肉功能和运动能力的丧失。下肢外骨骼康复机器人作为一种新兴的康复技术,可以提供精确的力量支持和运动辅助,帮助患者恢复肌肉力量和运动能力。本文综述了下肢外骨骼康复机器人的发展历程、康复效果以及在脑卒中康复中的应用研究。通过结合临床实践案例和相关研究结果,论证了下肢外骨骼康复机器人在脑卒中康复中的重要性和潜力。本研究旨在为脑卒中患者的恢复提供科学依据和技术支持。关
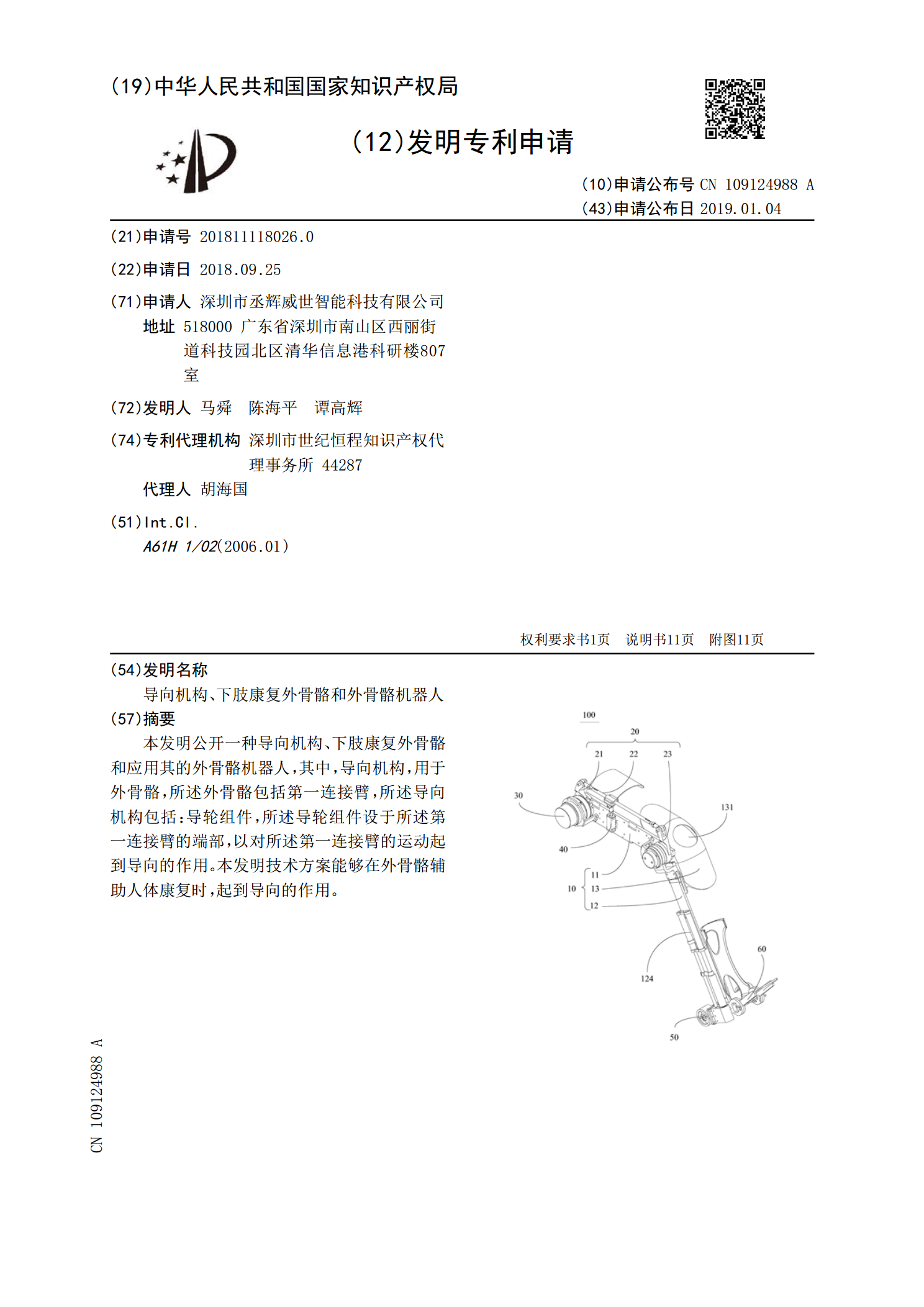
导向机构、下肢康复外骨骼和外骨骼机器人.pdf
本发明公开一种导向机构、下肢康复外骨骼和应用其的外骨骼机器人,其中,导向机构,用于外骨骼,所述外骨骼包括第一连接臂,所述导向机构包括:导轮组件,所述导轮组件设于所述第一连接臂的端部,以对所述第一连接臂的运动起到导向的作用。本发明技术方案能够在外骨骼辅助人体康复时,起到导向的作用。