
三臂回转式蔬菜钵苗取苗机构的设计与优化.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

三臂回转式蔬菜钵苗取苗机构的设计与优化.docx
三臂回转式蔬菜钵苗取苗机构的设计与优化标题:三臂回转式蔬菜钵苗取苗机构的设计与优化摘要:随着蔬菜苗播种的普及,苗取机构的设计和优化变得越来越重要。本论文研究了一种三臂回转式蔬菜钵苗取苗机构,以提高蔬菜苗的取苗效率和准确性。首先,对该机构的结构进行了详细介绍,包括三臂回转装置、苗取装置和控制系统等。然后,利用SolidWorks进行三维建模,通过有限元分析验证了该机构的结构强度和稳定性。接着,根据机构的特点,对关键参数进行了优化设计,以提高取苗效率和准确性。最后,进行了试验验证,结果表明该机构在蔬菜苗取苗方

蔬菜钵苗取苗机构的优化设计及试验研究.docx
蔬菜钵苗取苗机构的优化设计及试验研究摘要:蔬菜钵苗取苗机构是一种应用于蔬菜栽培领域的特种机械,可以自动化地进行蔬菜种子的分离和取苗,提高了蔬菜种植的效率和质量。本文基于机械设计理论和试验研究,对蔬菜钵苗取苗机构进行了优化设计和试验研究,提出了实用性和可行性更高的方案,并通过试验验证了该方案的可行性和实用性。关键词:蔬菜钵苗取苗机构;优化设计;试验研究;机械设计理论。一、引言随着工业化、城市化进程的加速,全球人口不断增长,农业生产的需求越来越大。而蔬菜是人们日常生活中不可少的一部分,其需求量不断增加。针对这

探出取推钵式蔬菜钵苗取苗机构优化设计与试验的任务书.docx
探出取推钵式蔬菜钵苗取苗机构优化设计与试验的任务书任务书任务名称:探出取推钵式蔬菜钵苗取苗机构优化设计与试验任务目的:本项目旨在设计和优化一种探出取推钵式蔬菜钵苗取苗机构,以提高蔬菜种植生产效率,降低人工成本,并进行试验验证其可行性。任务描述:目前,蔬菜种植生产中的一个重要环节是种植苗的选取和搬运,在传统的种植方式中,采用手工取苗的方法,存在人工成本高、效率低、劳动强度大、作业环境差等诸多问题。因此,一种自动化的取苗机构将对蔬菜种植生产的优化和提升起到重要作用。本项目的核心是设计一种探出取推钵式蔬菜钵苗取

蔬菜钵苗取苗机构的优化设计及试验研究的任务书.docx
蔬菜钵苗取苗机构的优化设计及试验研究的任务书任务书题目:蔬菜钵苗取苗机构的优化设计及试验研究一、研究背景及意义蔬菜是我们日常生活中重要的膳食来源,而蔬菜的种植和生产过程中,钵苗(也称育苗杯)是不可或缺的组成部分。目前市场上常见的钵苗为塑料杯或瓷杯等容器,而此类容器需要手工取苗,操作不便,效率低下,且易造成苗期幼苗伤害,增加施肥成本。因此,设计一种高效智能的蔬菜钵苗取苗机构具有重要的现实意义。二、研究内容及步骤1.研究对象:蔬菜钵苗取苗机构2.研究目标:实现高效智能的蔬菜钵苗取苗,提升苗期幼苗的生长质量和育
钵苗移栽机植苗机构取苗臂.pdf
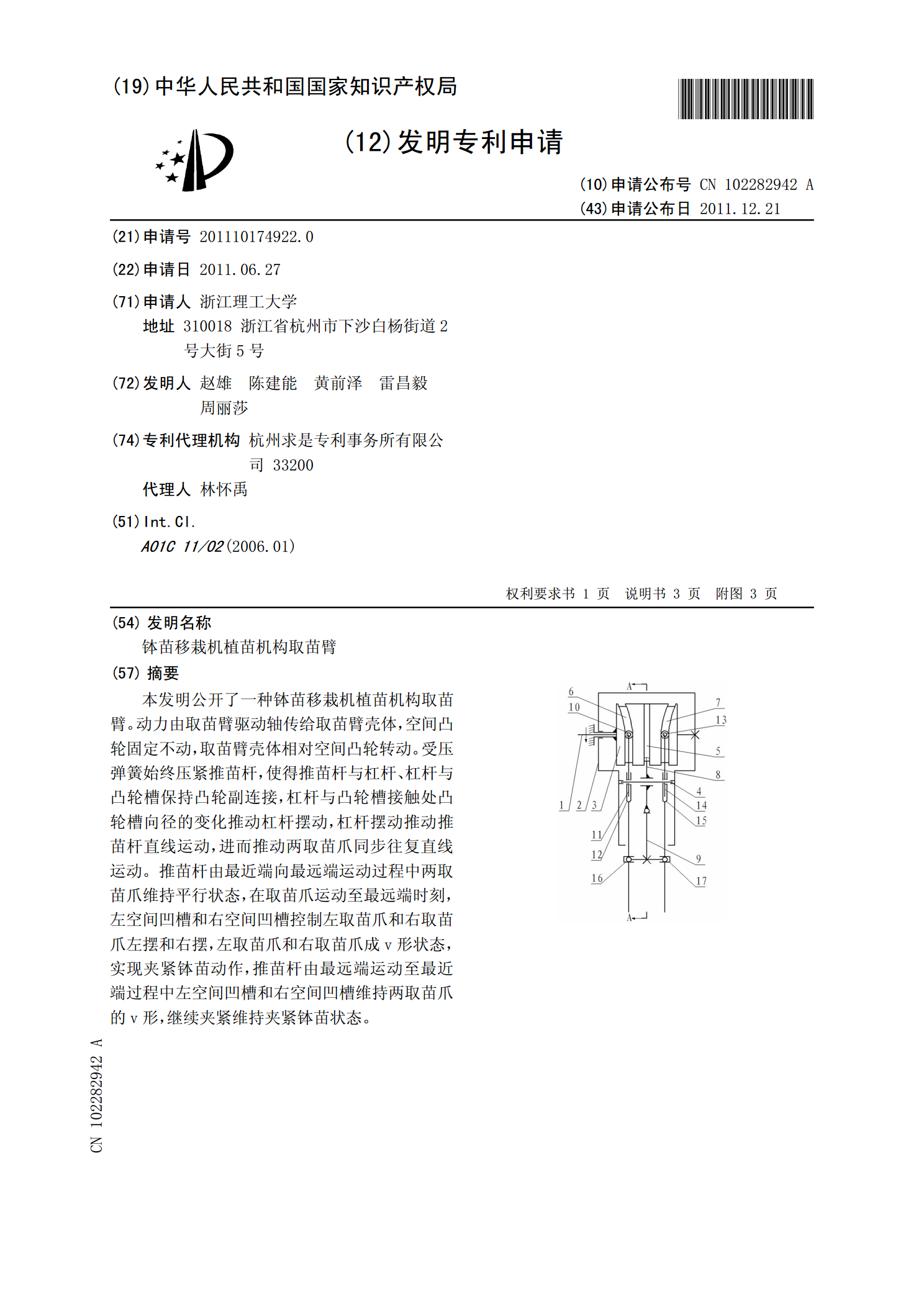
本发明公开了一种钵苗移栽机植苗机构取苗臂。动力由取苗臂驱动轴传给取苗臂壳体,空间凸轮固定不动,取苗臂壳体相对空间凸轮转动。受压弹簧始终压紧推苗杆,使得推苗杆与杠杆、杠杆与凸轮槽保持凸轮副连接,杠杆与凸轮槽接触处凸轮槽向径的变化推动杠杆摆动,杠杆摆动推动推苗杆直线运动,进而推动两取苗爪同步往复直线运动。推苗杆由最近端向最远端运动过程中两取苗爪维持平行状态,在取苗爪运动至最远端时刻,左空间凹槽和右空间凹槽控制左取苗爪和右取苗爪左摆和右摆,左取苗爪和右取苗爪成v形状态,实现夹紧钵苗动作,推苗杆由最远端运动至最近