
抗高过载微惯性测量单元设计与分析的中期报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

抗高过载微惯性测量单元设计与分析的中期报告.docx
抗高过载微惯性测量单元设计与分析的中期报告一、项目背景惯性测量单元(IMU)是一种能够测量物体运动状态的传感器,具有测量精度高、反应速度快等优点,在航空、航天、制导导航等领域广泛应用。但在实际应用中,IMU往往面临着高过载、强干扰等复杂环境下的实测问题,因此设计一种具有抗高过载能力的微惯性测量单元对于提高IMU的实用性和性能具有重要意义。二、设计要求本次项目设计要求,设计一种抗高过载微惯性测量单元,具有如下特点:1.具有良好的抗高过载能力,能够在高过载条件下保证信号采集的准确性和稳定性。2.设计简单,工艺

一种抗高过载的微惯性测量组件结构.pdf
本发明公开了一种抗高过载的微惯性测量组件结构,包括一支撑结构,支撑结构为由支撑棱形成的中部镂空的六面体结构,六面体形成的三个正交的轴向侧面形成贯通;其中一个镂空平面的至少一个边框向外延伸形成凸台,使支撑结构具有7个可供安装电路板的镂空平面;经三个正交的轴向侧面向六面体结构的内部空间填充灌封材料。本发明的结构降低了传感器电路板以及整体组件的装配复杂程度;为灌封过程中材料的流淌预留空间或者通道,保证灌封的密实性;结构设计新颖,易于装配操作,在实现小型化设计的同时满足抗高过载需求。

弹载惯性测量系统抗高过载技术.docx
弹载惯性测量系统抗高过载技术标题:弹载惯性测量系统抗高过载技术摘要:随着高速运动的发展,惯性测量系统在许多领域中得到了广泛应用。然而,高过载环境对于系统的测量精度和性能提出了严峻的挑战。本论文主要探讨弹载惯性测量系统抗高过载技术,包括系统结构设计、陀螺仪抗高过载技术、加速度计抗高过载技术以及系统的鲁棒性优化等方面。通过分析不同的抗高过载技术,可以提高系统在高过载环境中的稳定性和可靠性,满足实际应用的需求。第一部分:引言1.研究背景和意义2.文章结构概述第二部分:弹载惯性测量系统结构设计1.系统组成和工作原

弹载惯性测量系统抗高过载技术.docx
弹载惯性测量系统抗高过载技术1.引言惯性测量系统是一种常见的测量设备,广泛应用于航空、航天、导航、姿态控制等领域。弹载惯性测量系统一般指安装在导弹等弹道飞行器上的惯性测量系统。由于飞行器在飞行过程中会遭受高加速度的冲击,因此在弹载惯性测量系统中需要考虑抗高过载技术,以保障系统的测量精度和可靠性。本文将从弹载惯性测量系统的基本原理入手,介绍抗高过载技术的原理、应用和优化方法,并对其未来的发展进行展望。2.弹载惯性测量系统的基本原理弹载惯性测量系统是一种基于惯性传感器进行姿态、位置等参数测量的系统,通常由加速
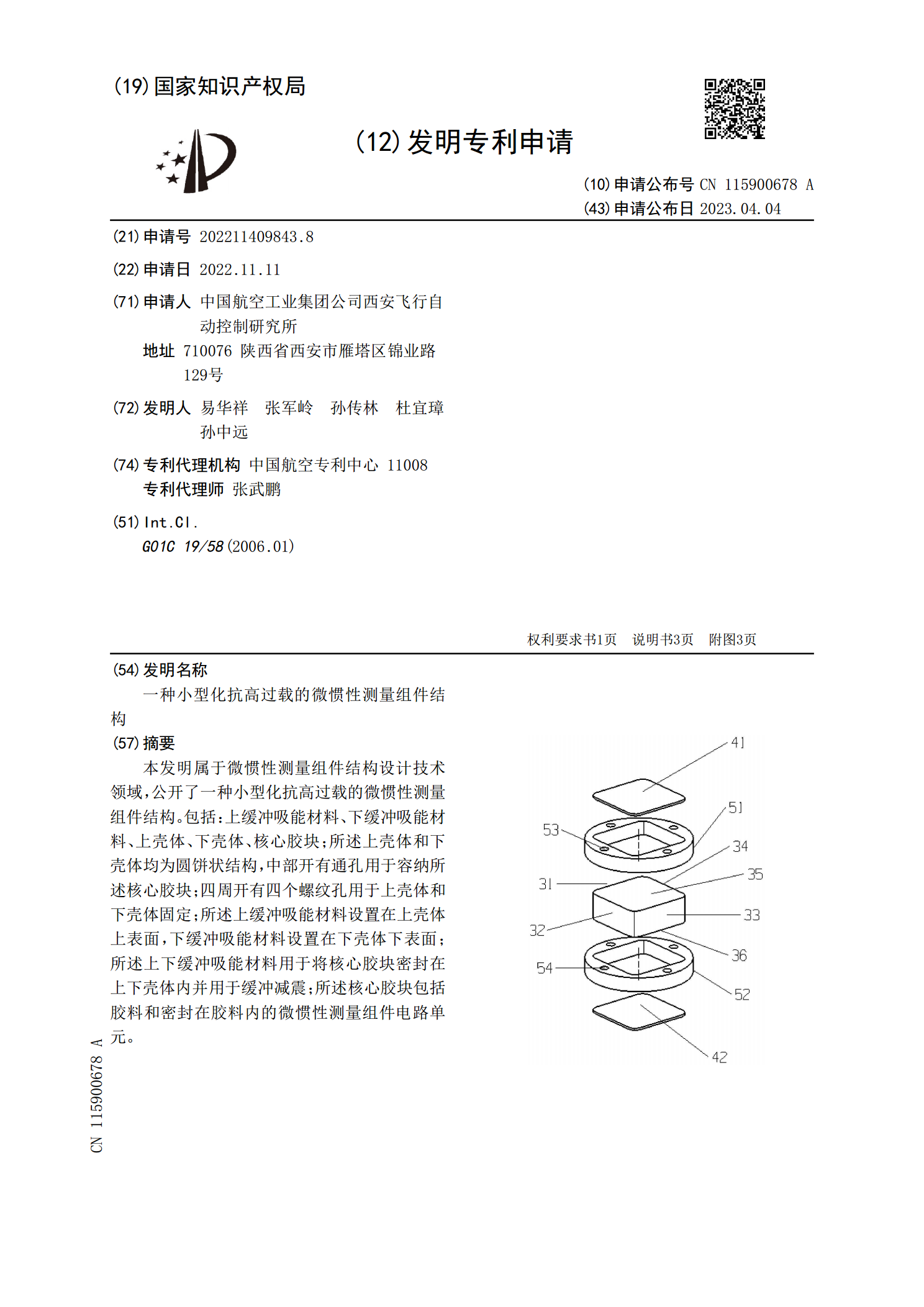
一种小型化抗高过载的微惯性测量组件结构.pdf
本发明属于微惯性测量组件结构设计技术领域,公开了一种小型化抗高过载的微惯性测量组件结构。包括:上缓冲吸能材料、下缓冲吸能材料、上壳体、下壳体、核心胶块;所述上壳体和下壳体均为圆饼状结构,中部开有通孔用于容纳所述核心胶块;四周开有四个螺纹孔用于上壳体和下壳体固定;所述上缓冲吸能材料设置在上壳体上表面,下缓冲吸能材料设置在下壳体下表面;所述上下缓冲吸能材料用于将核心胶块密封在上下壳体内并用于缓冲减震;所述核心胶块包括胶料和密封在胶料内的微惯性测量组件电路单元。