
自升式钻井平台升降控制系统研究.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

自升式钻井平台升降控制系统研究.docx
自升式钻井平台升降控制系统研究摘要本文旨在研究自升式钻井平台升降控制系统。文章首先介绍了自升式钻井平台的基本构造和工作原理,然后详细分析了升降控制系统的设计要求和工作原理,其中包括传感器、执行器、控制器等重要组件的功能。在设计自升式钻井平台升降控制系统的过程中,本文结合了模糊控制和PID控制的方法,提出了一种新的设计方案,并将其应用到了实际的生产中。经过实际应用,该系统在提高生产效率、降低生产成本、提高系统安全可靠性方面取得了显著成效。关键词:自升式钻井平台;升降控制系统;传感器;执行器;控制器;模糊控制
自升式钻井平台及其升降装置.pdf
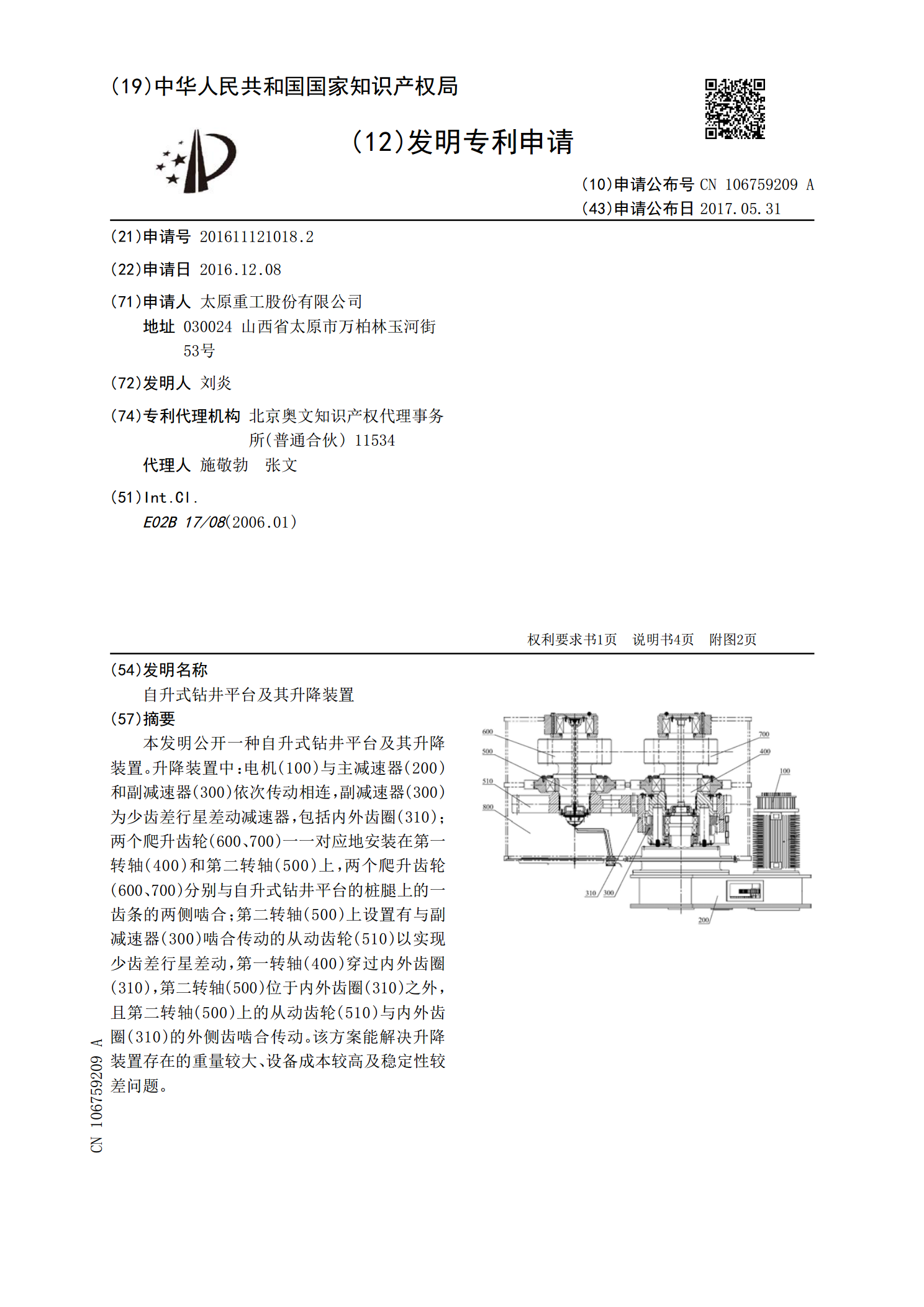
本发明公开一种自升式钻井平台及其升降装置。升降装置中:电机(100)与主减速器(200)和副减速器(300)依次传动相连,副减速器(300)为少齿差行星差动减速器,包括内外齿圈(310);两个爬升齿轮(600、700)一一对应地安装在第一转轴(400)和第二转轴(500)上,两个爬升齿轮(600、700)分别与自升式钻井平台的桩腿上的一齿条的两侧啮合;第二转轴(500)上设置有与副减速器(300)啮合传动的从动齿轮(510)以实现少齿差行星差动,第一转轴(400)穿过内外齿圈(310),第二转轴(500)

自升式海洋钻井平台升降装置.pdf
本发明涉及一种自升式海洋钻井平台升降装置,包括平行轴减速器机构以及行星齿轮减速组件;所述平行轴减速机构包括箱体总成、输入齿轮轴系和平行齿轮轴系,其中输入齿轮轴系联接电机,平行齿轮轴系联接行星齿轮减速组件;所述行星齿轮减速组件包括三组行星齿轮减速机构,其中一级行星齿轮减速机构的一级太阳轮联接所述平行齿轮轴系,所述一级行星齿轮减速机构的一级行星架与二级行星齿轮减速机构的二级太阳轮联接,所述二级行星齿轮减速机构的二级行星架与三级行星齿轮减速机构的三级太阳轮联接,所述三级行星齿轮减速机构的三级行星架与所述主输出轴
自升式钻井平台升降系统的减速装置.pdf
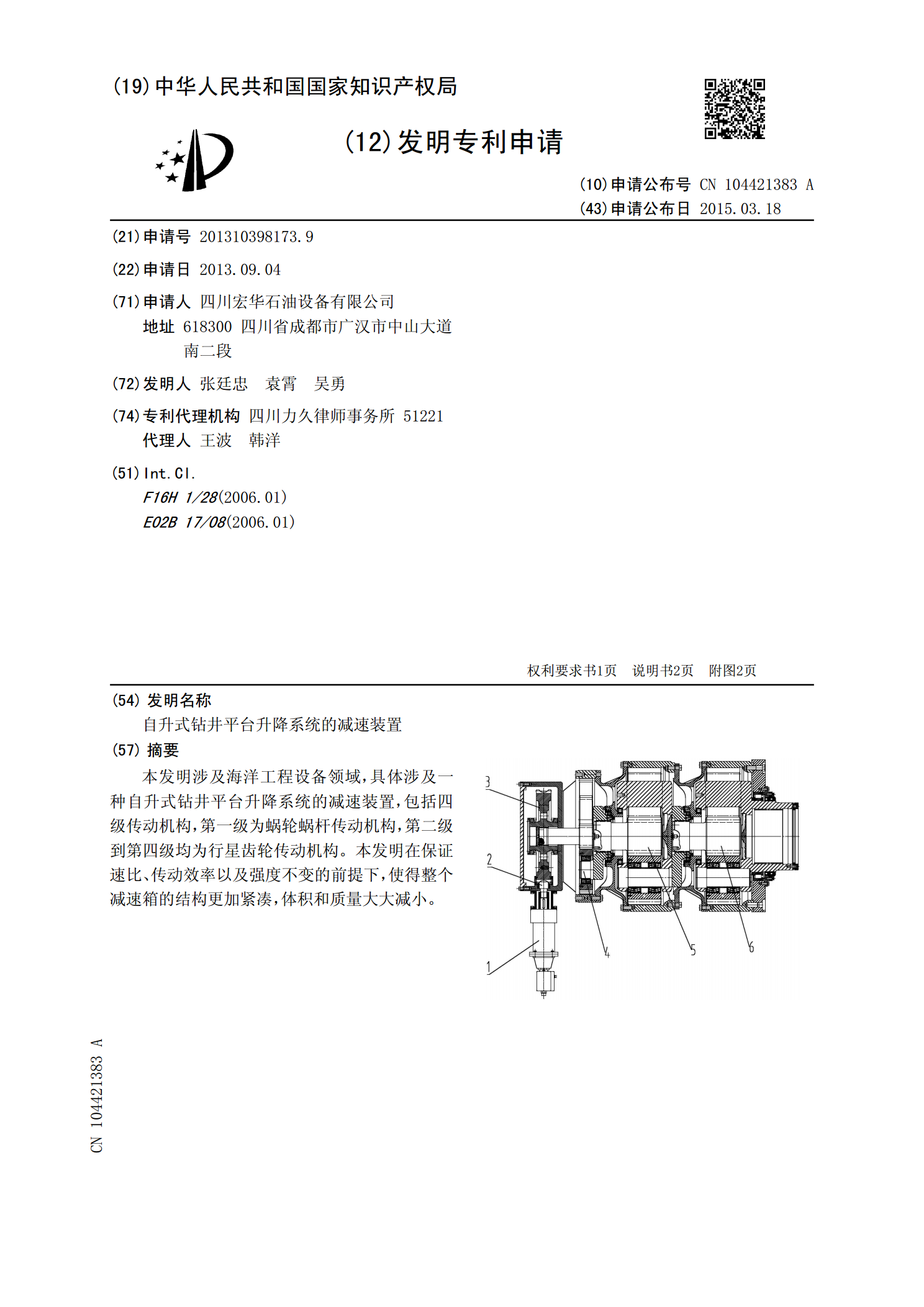
本发明涉及海洋工程设备领域,具体涉及一种自升式钻井平台升降系统的减速装置,包括四级传动机构,第一级为蜗轮蜗杆传动机构,第二级到第四级均为行星齿轮传动机构。本发明在保证速比、传动效率以及强度不变的前提下,使得整个减速箱的结构更加紧凑,体积和质量大大减小。

新型自升式海洋钻井平台升降装置.pdf
本发明公开了一种新型自升式海洋钻井平台升降装置,其交错轴及平行轴齿轮减速机构的箱体内安装有输入轴系、减速轴系和输出轴系,所述输出轴系为少齿差行星齿轮减速机构的曲轴,所述少齿差行星齿轮减速机构和NGW行星齿轮减速机构的内齿圈分别设置在同一壳体的内圆表面上,该壳体的一端与所述箱体联接,其另一端与大法兰联接,所述大法兰安装在平台主结构架上,所述少齿差行星齿轮减速机构的行星架与所述NGW行星齿轮减速机构的太阳轮轮轴联接;所述NGW行星齿轮减速机构的行星架与七齿输出轴联接,所述七齿输出轴上安装有七齿齿轮。本发明采用