
基于几何特征的点云目标检测方法研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于几何特征的点云目标检测方法研究的任务书.docx
基于几何特征的点云目标检测方法研究的任务书任务书题目:基于几何特征的点云目标检测方法研究研究背景:在智能驾驶、机器人自主导航等领域中,点云数据的处理是关键技术之一。点云数据是一种三维信息表示形式,被广泛应用于目标识别、物体重建、导航规划等方面。其中,点云目标检测是点云处理的重要应用之一,它对于实现自动驾驶、机器人导航等功能至关重要。在目标检测领域中,基于深度学习的方法已经取得了很大的成功。但是在点云目标检测领域中,由于点云数据自身的特殊性质,如点云稀疏性、噪声等,使用深度学习方法面临着很大的挑战。因此,基

基于几何特征的点云目标检测方法研究的开题报告.docx
基于几何特征的点云目标检测方法研究的开题报告一、选题背景及意义随着三维激光扫描技术的发展,点云数据已成为三维物体感知的重要工具之一。点云数据着重于采集和表示物体的表面形状,其利用离散的点来描述场景,不受尺寸、外观、遮挡等因素的影响,能够准确描述物体的空间结构。因此,点云数据广泛应用于许多领域,如机器人、自动驾驶、军事等,在物体识别、场景重建、导航规划等任务中发挥着重要作用。在应用中,点云目标检测是点云数据处理的关键问题之一。目标检测旨在识别场景中的物体,其主要任务是从点云数据中找到预定义目标并对其进行分类

基于局部几何特征的稠密点云配准方法.docx
基于局部几何特征的稠密点云配准方法摘要:稠密点云配准是点云处理中的重要问题之一。本文提出了一种基于局部几何特征的稠密点云配准方法。该方法利用特征描述符和一种迭代最近点算法,通过寻找稠密点云中的相似局部特征,实现点云的准确配准。实验结果表明,该方法能够有效地实现稠密点云的配准,具有较高的精度和鲁棒性。关键词:稠密点云配准、局部几何特征、特征描述符、迭代最近点算法一、引言随着多源数据的广泛应用和三维建模技术的不断发展,点云处理技术越来越受到研究者们的关注。其中,点云配准是点云处理中的一个重要研究问题,主要用于
基于点云形状特征的检测方法及系统.pdf
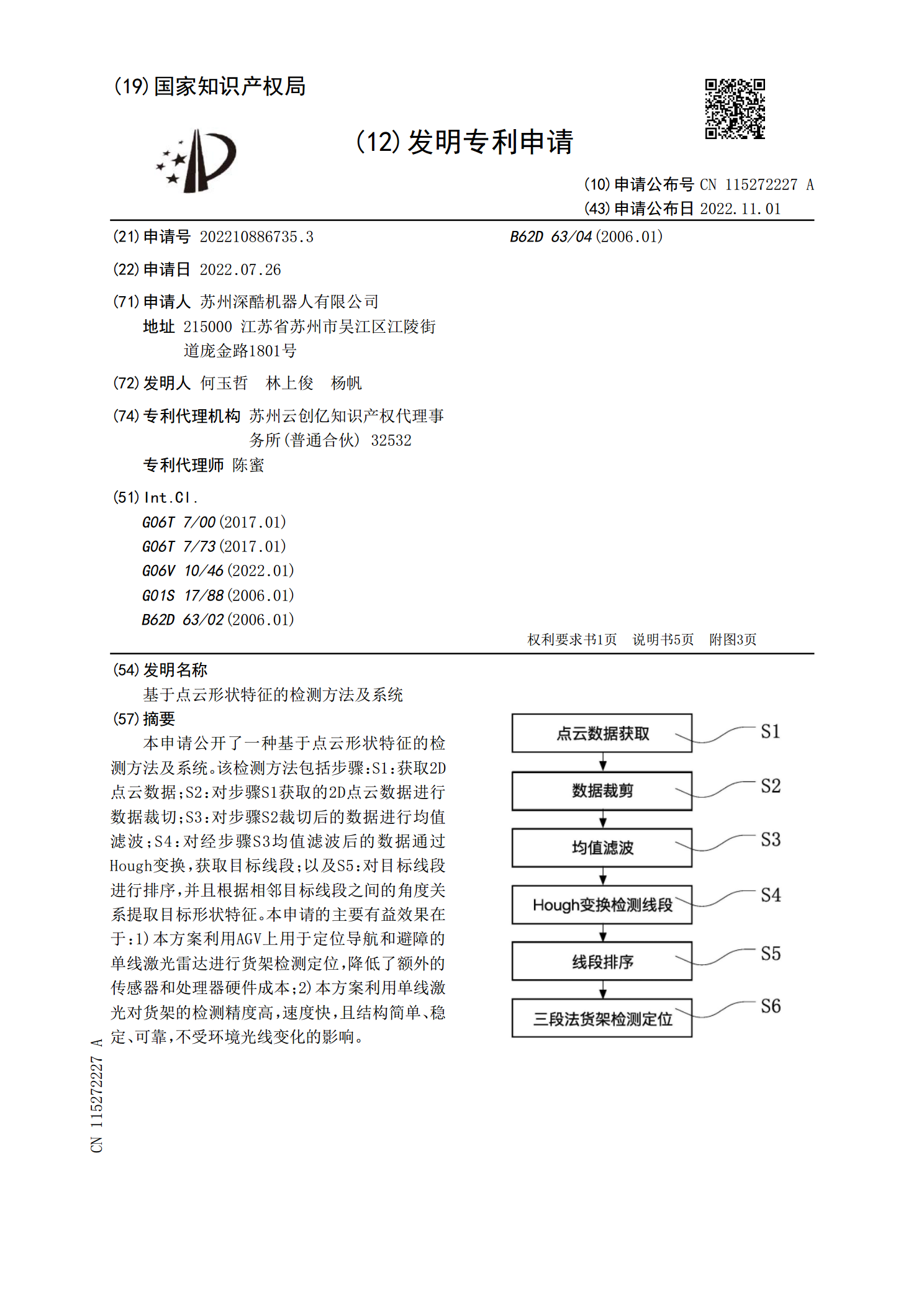
本申请公开了一种基于点云形状特征的检测方法及系统。该检测方法包括步骤:S1:获取2D点云数据;S2:对步骤S1获取的2D点云数据进行数据裁切;S3:对步骤S2裁切后的数据进行均值滤波;S4:对经步骤S3均值滤波后的数据通过Hough变换,获取目标线段;以及S5:对目标线段进行排序,并且根据相邻目标线段之间的角度关系提取目标形状特征。本申请的主要有益效果在于:1)本方案利用AGV上用于定位导航和避障的单线激光雷达进行货架检测定位,降低了额外的传感器和处理器硬件成本;2)本方案利用单线激光对货架的检测精度高,

基于特征点的目标检测方法.docx
基于特征点的目标检测方法摘要:特征点目标检测方法是一种基于图像特征点的目标检测方法。这种方法依靠图像特征点的稳定性、不变性及特征描述符的鲁棒性对目标进行检测。本文将介绍特征点目标检测的原理、流程、常用算法及其优缺点,并对其在实际应用中的表现进行了分析和总结。关键词:特征点、目标检测、特征描述符、SIFT、SURF、FAST、ORB一、概述目标检测一直是图像处理领域的重要研究方向。在大部分应用场合下,人们往往需要在图像或视频中定位出目标,并进行识别、跟踪等处理。目标检测方法可以分为基于颜色的方法、基于形状的