
新型高速并联光学扫描平台设计研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

新型高速并联光学扫描平台设计研究.docx
新型高速并联光学扫描平台设计研究题目:新型高速并联光学扫描平台设计研究摘要:随着科技的发展和工程技术的不断提升,现代制造领域的高精度和高效率已经成为关键的问题。该论文主要针对新型高速并联光学扫描平台设计研究,介绍了基本原理和技术实现。针对该平台的特点和应用需求,提出了相应的设计方案和改进措施,使其在实际应用中能够更好地发挥作用。在实验室测试和工业实际应用中,该平台均取得了良好的效果。关键词:高速并联光学扫描平台,设计,研究,应用一、引言现代制造领域的高精度和高效率已成为关键的问题,而高精度制造的核心就在于

一种新型高速高精2自由度并联平台的设计综述报告.docx
一种新型高速高精2自由度并联平台的设计综述报告随着制造业和自动化技术的不断发展,机器人技术在现代工业生产中扮演着越来越重要的角色。并联机器人平台作为一种常见的平台类型,能够在机器人的动力学性能、操作精度和自由度等方面提供更高的水平。然而,在实际应用中,机器人平台的设计和制造仍然面临着许多技术难题。一种新型高速高精2自由度并联平台的设计综述报告将介绍最新的平台设计技术、结构特点、应用案例等内容。首先,为了满足高速工作需要,该平台的驱动系统采用了两个AC伺服电机作为动力源,可分别驱动两个手臂实现平台左右两端的

新型通用SOC验证平台的设计研究.docx
新型通用SOC验证平台的设计研究设计和研究新型通用SoC验证平台摘要:随着系统级芯片(SoC)的不断发展和集成度的提高,SoC的验证变得越来越重要。本论文旨在设计和研究一种新型通用SoC验证平台,该平台可以提供高效、准确和可扩展的验证环境,以应对不断增长的验证复杂性和挑战。在本文中,我们将介绍这种新型通用SoC验证平台的设计原则和方法,并提出了一个基于该平台的验证案例研究。第一部分:引言1.1背景1.2目标和意义1.3论文结构第二部分:相关工作2.1SoC验证的挑战2.2现有的验证方法和平台2.3验证平台
超高速光学扫描装置.pdf
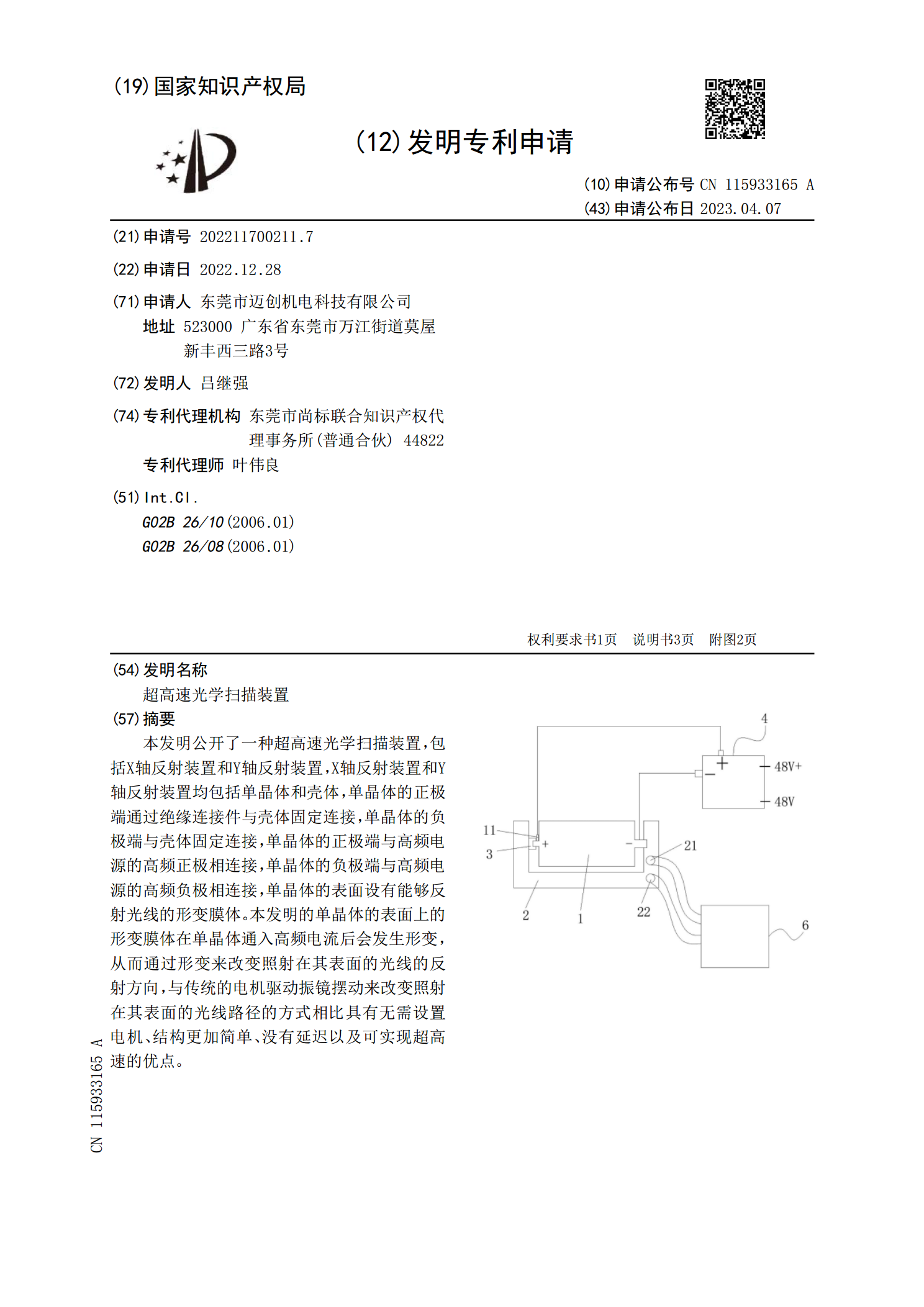
本发明公开了一种超高速光学扫描装置,包括X轴反射装置和Y轴反射装置,X轴反射装置和Y轴反射装置均包括单晶体和壳体,单晶体的正极端通过绝缘连接件与壳体固定连接,单晶体的负极端与壳体固定连接,单晶体的正极端与高频电源的高频正极相连接,单晶体的负极端与高频电源的高频负极相连接,单晶体的表面设有能够反射光线的形变膜体。本发明的单晶体的表面上的形变膜体在单晶体通入高频电流后会发生形变,从而通过形变来改变照射在其表面的光线的反射方向,与传统的电机驱动振镜摆动来改变照射在其表面的光线路径的方式相比具有无需设置电机、结构

一种新型4自由度高速并联机器人设计方法.docx
一种新型4自由度高速并联机器人设计方法标题:一种新型4自由度高速并联机器人设计方法摘要:本论文提出了一种新型的4自由度高速并联机器人设计方法,该方法以提高机器人运动效率和精度为目标,结合机器人动力学建模与最优化设计技术,对机器人结构进行优化设计。本文首先介绍了并联机器人的基本概念和分类,然后详细阐述了新型4自由度高速并联机器人的设计方法及关键技术,最后通过仿真实验验证了该设计方法的有效性和性能优势。关键词:4自由度高速并联机器人,设计方法,动力学建模,最优化设计,仿真实验一、引言并联机器人是一类具有多个并