
动态环境下的视觉SLAM地图构建研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

动态环境下的视觉SLAM地图构建研究的任务书.docx
动态环境下的视觉SLAM地图构建研究的任务书任务书:动态环境下的视觉SLAM地图构建研究1.研究背景视觉SLAM是一种通过相机对周围环境进行实时建图和定位的技术,被广泛应用于机器人导航、自主驾驶、虚拟现实等领域。目前,大多数视觉SLAM算法都是在环境静态的情况下进行建图和定位的。然而,在实际应用中,环境往往是动态变化的,像行人、车辆等运动物体会影响到视觉SLAM的精度和鲁棒性,甚至会导致地图漂移或者崩溃。因此,如何在动态环境下构建准确稳定的视觉SLAM地图是一个亟待解决的问题。2.研究任务本课题旨在研究视

动态环境下的视觉SLAM系统研究的任务书.docx
动态环境下的视觉SLAM系统研究的任务书一、研究背景随着机器人技术的不断发展,环境感知、定位与导航等关键技术已经成为机器人应用的重要组成部分。在诸多机器人应用中,视觉SLAM系统受到了广泛的关注和应用。视觉SLAM系统可以通过相机来获取环境的信息,实现机器人在未知环境中的建图、定位和导航等功能。但是,现实世界中的环境往往是动态变化的,视觉SLAM系统如何在动态环境中正确地处理环境的变化,保证机器人实现准确的定位和建图等任务,是一个难点和研究热点。二、研究目的本篇任务书旨在研究动态环境下的视觉SLAM系统,

动态环境下的语义视觉SLAM算法研究.docx
动态环境下的语义视觉SLAM算法研究摘要:语义视觉SLAM算法是一种结合了语义理解与传统视觉SLAM算法的新型算法,可以为机器人在复杂动态环境下高效、精确地完成位置感知和路径规划。本文首先介绍了视觉SLAM算法和语义理解的基本概念,然后阐述了动态环境对SLAM算法带来的挑战和需要解决的问题。随后,本文重点讲解了语义视觉SLAM算法的整体架构,包括语义感知、传统视觉SLAM和语义约束融合的过程。最后,本文对语义视觉SLAM算法的研究和未来发展进行了展望,包括更多通用物体识别算法的加入,以及结合深度学习等技术

基于动态区域剔除与稠密地图构建的视觉SLAM算法.docx
本文档只有word版,所有PDF版本都为盗版,侵权必究基于动态区域剔除与稠密地图构建的视觉SLAM算法目录一、内容概述................................................21.1背景与意义...........................................21.2国内外研究现状.......................................31.3主要内容与结构...................................
基于视觉SLAM的动态场景多语义地图构建方法及设备.pdf
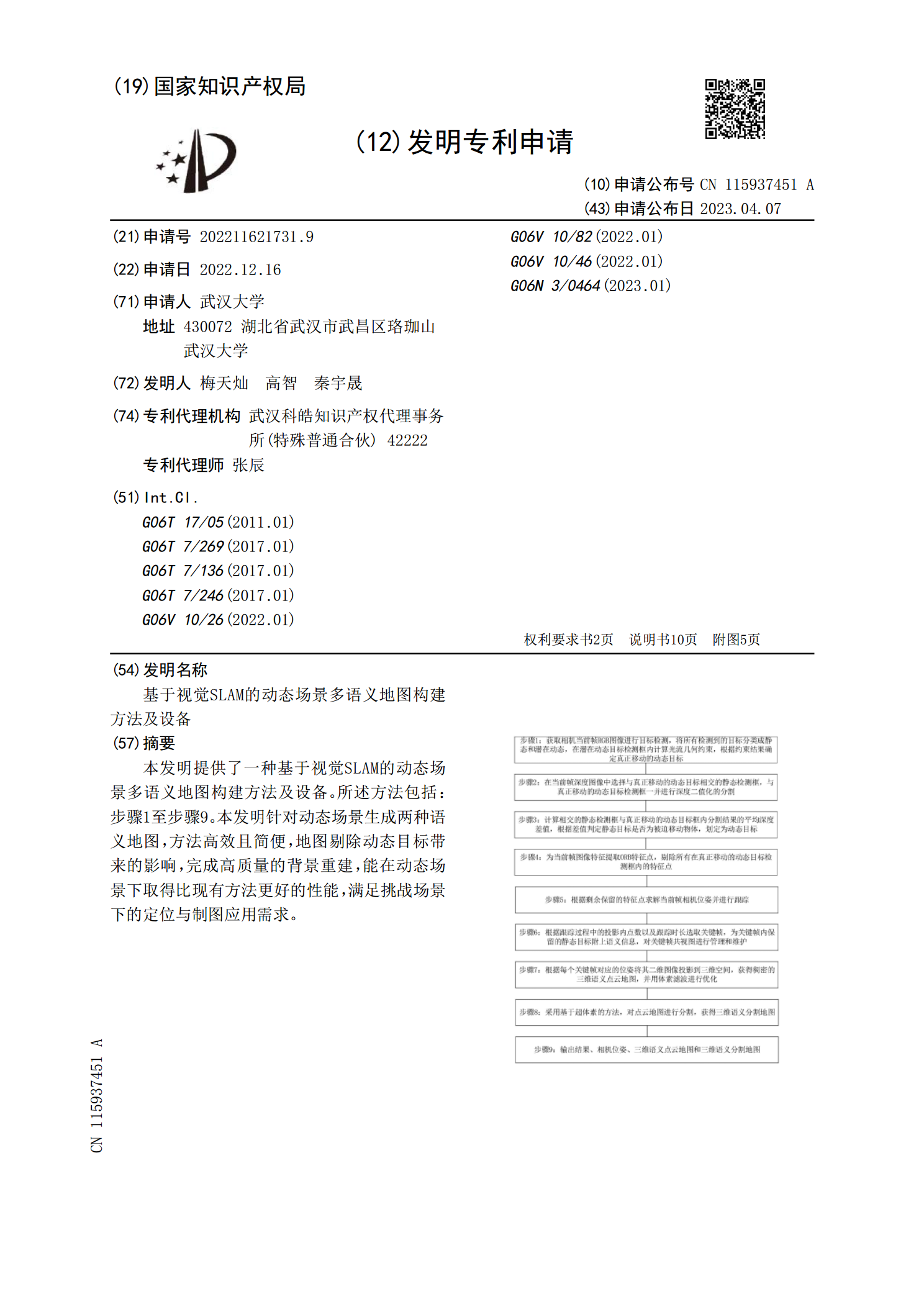
本发明提供了一种基于视觉SLAM的动态场景多语义地图构建方法及设备。所述方法包括:步骤1至步骤9。本发明针对动态场景生成两种语义地图,方法高效且简便,地图剔除动态目标带来的影响,完成高质量的背景重建,能在动态场景下取得比现有方法更好的性能,满足挑战场景下的定位与制图应用需求。