
基于视觉SLAM的动态场景多语义地图构建方法及设备.pdf

小新****ou

1/10
2/10
3/10
4/10
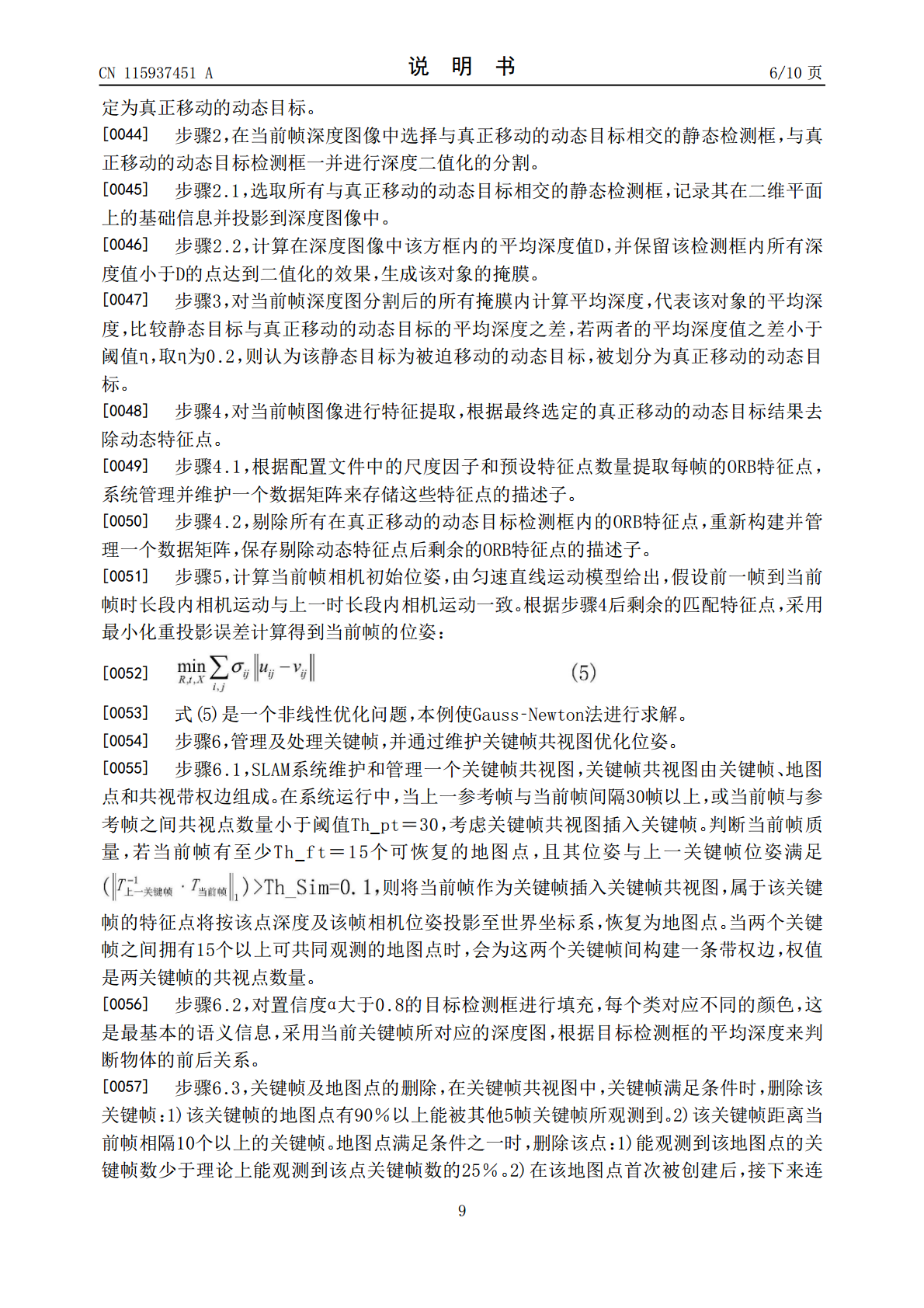
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于视觉SLAM的动态场景多语义地图构建方法及设备.pdf
本发明提供了一种基于视觉SLAM的动态场景多语义地图构建方法及设备。所述方法包括:步骤1至步骤9。本发明针对动态场景生成两种语义地图,方法高效且简便,地图剔除动态目标带来的影响,完成高质量的背景重建,能在动态场景下取得比现有方法更好的性能,满足挑战场景下的定位与制图应用需求。

基于深度学习的视觉SLAM语义地图构建.docx
基于深度学习的视觉SLAM语义地图构建基于深度学习的视觉SLAM语义地图构建摘要:随着无人机、自动驾驶汽车和增强现实等领域的快速发展,视觉SLAM(SimultaneousLocalizationandMapping,即同时定位和地图构建)成为了一个备受关注的研究领域。传统的视觉SLAM主要依赖于几何信息来构建地图,但是这种方法无法提供更高级别的语义信息。因此,本文提出了一种基于深度学习的方法,通过融合语义信息和几何信息来构建视觉SLAM的语义地图。本方法首先使用深度学习模型对传感器采集到的图像进行语义分

基于语义分割网络的动态场景视觉SLAM算法.docx
基于语义分割网络的动态场景视觉SLAM算法标题:基于语义分割网络的动态场景视觉SLAM算法摘要:随着机器人技术的发展,动态场景下的视觉SLAM算法变得越来越重要。视觉SLAM技术在无人驾驶、增强现实等领域具有广泛应用。然而,传统的视觉SLAM算法在处理动态场景时面临诸多困难,例如遮挡、运动模糊等。本文提出了一种基于语义分割网络的动态场景视觉SLAM算法,通过结合语义信息和图像序列的视觉信息,可以在动态场景下实现更稳定的定位和地图建立。1.引言视觉SLAM是一种同时实现定位与地图构建的技术,可以帮助机器人在

基于视觉SLAM和目标检测的语义地图构建.docx
基于视觉SLAM和目标检测的语义地图构建随着视觉SLAM技术和目标检测技术的不断发展,语义地图构建作为其中一个重要的应用之一,逐渐成为研究的热点。本文将深入探讨基于视觉SLAM和目标检测的语义地图构建技术。一、视觉SLAM技术视觉SLAM技术能够在无GPS、无预先建图的情况下,利用相机采集的图像信息,实现位置和姿态的实时估计,以及三维地图的在线构建。该技术已广泛应用于机器人导航、虚拟增强现实等领域。视觉SLAM技术主要由以下几个部分组成:前端、后端、回环检测和地图管理。前端负责提取特征点、匹配点对、估计位

基于YOLOv3和视觉SLAM的语义地图构建.docx
基于YOLOv3和视觉SLAM的语义地图构建基于YOLOv3和视觉SLAM的语义地图构建摘要:近年来,随着计算机视觉和机器学习的蓬勃发展,语义地图构建成为了一项重要的研究课题。语义地图可以为机器人在未知环境中进行自主导航和任务执行提供重要的信息支持。本文提出了一种基于YOLOv3和视觉SLAM的语义地图构建方法。该方法通过融合YOLOv3目标检测算法和视觉SLAM技术,实现了对环境中的物体进行实时识别和定位,并将其标记在地图上,构建出含有语义信息的地图。实验结果表明,该方法能够有效地提取出环境中的语义信息