
割胶机器人的割胶位置视觉伺服控制研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

割胶机器人的割胶位置视觉伺服控制研究的任务书.docx
割胶机器人的割胶位置视觉伺服控制研究的任务书任务书一、题目:割胶机器人的割胶位置视觉伺服控制研究二、研究背景:割胶机器人在工业生产中的应用越来越广泛,如汽车、飞机、电子等行业都有着广泛的应用。割胶机器人的割胶位置对于产品的种类和质量至关重要,所以割胶位置的精度和稳定性成为衡量割胶机器人性能的重要指标。传统的割胶机器人控制方式是根据机器人运动轨迹的固定,通过编程方式去控制割胶机器人的运动。然而,实际生产中所遇到的产品种类繁多,每个产品的割胶位置都不尽相同,采用传统的方法需要不断对机器人进行调整,这不仅浪费了

割胶机器人的割胶位置视觉伺服控制研究的开题报告.docx
割胶机器人的割胶位置视觉伺服控制研究的开题报告标题:割胶机器人的割胶位置视觉伺服控制研究开题报告一、研究背景及意义在工业生产中,切割和割胶是广泛应用的工艺,在制造过程中,割胶工作处于整个加工流程的末端,因此准确的割裁结果对产品质量具有重要的影响。传统的割胶方式一般使用手动切割,效率低下,不精确,容易产生浪费。因此研究割胶机器人的割胶视觉伺服控制技术,实现对割胶位置的精确控制,提高生产效率和加工精度,具有重要的意义和应用价值。二、研究现状及存在问题机器人割胶系统是一种吸附式机器人系统,机器人可沿指定轨迹移动
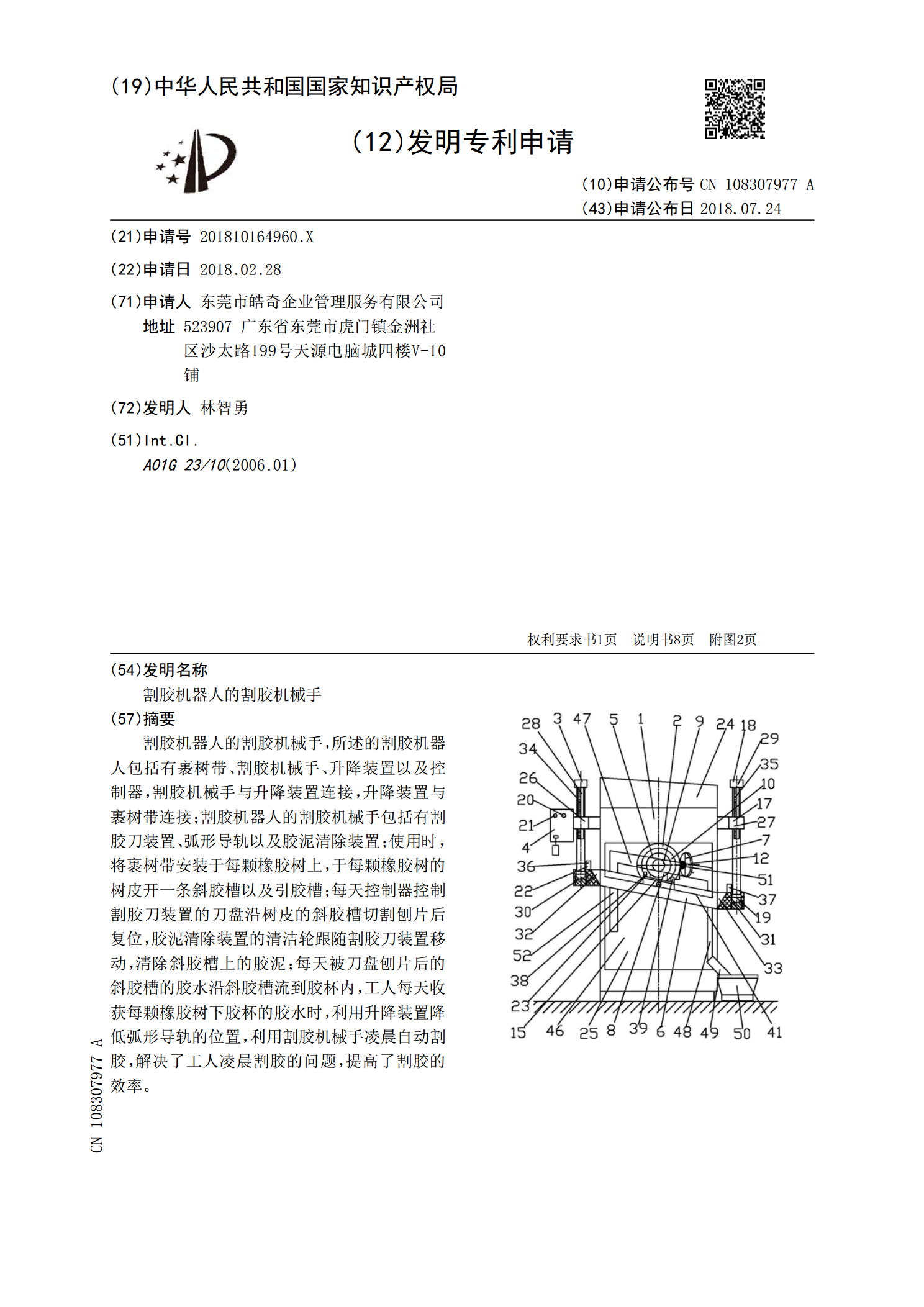
割胶机器人的割胶机械手.pdf
割胶机器人的割胶机械手,所述的割胶机器人包括有裹树带、割胶机械手、升降装置以及控制器,割胶机械手与升降装置连接,升降装置与裹树带连接;割胶机器人的割胶机械手包括有割胶刀装置、弧形导轨以及胶泥清除装置;使用时,将裹树带安装于每颗橡胶树上,于每颗橡胶树的树皮开一条斜胶槽以及引胶槽;每天控制器控制割胶刀装置的刀盘沿树皮的斜胶槽切割刨片后复位,胶泥清除装置的清洁轮跟随割胶刀装置移动,清除斜胶槽上的胶泥;每天被刀盘刨片后的斜胶槽的胶水沿斜胶槽流到胶杯内,工人每天收获每颗橡胶树下胶杯的胶水时,利用升降装置降低弧形导轨
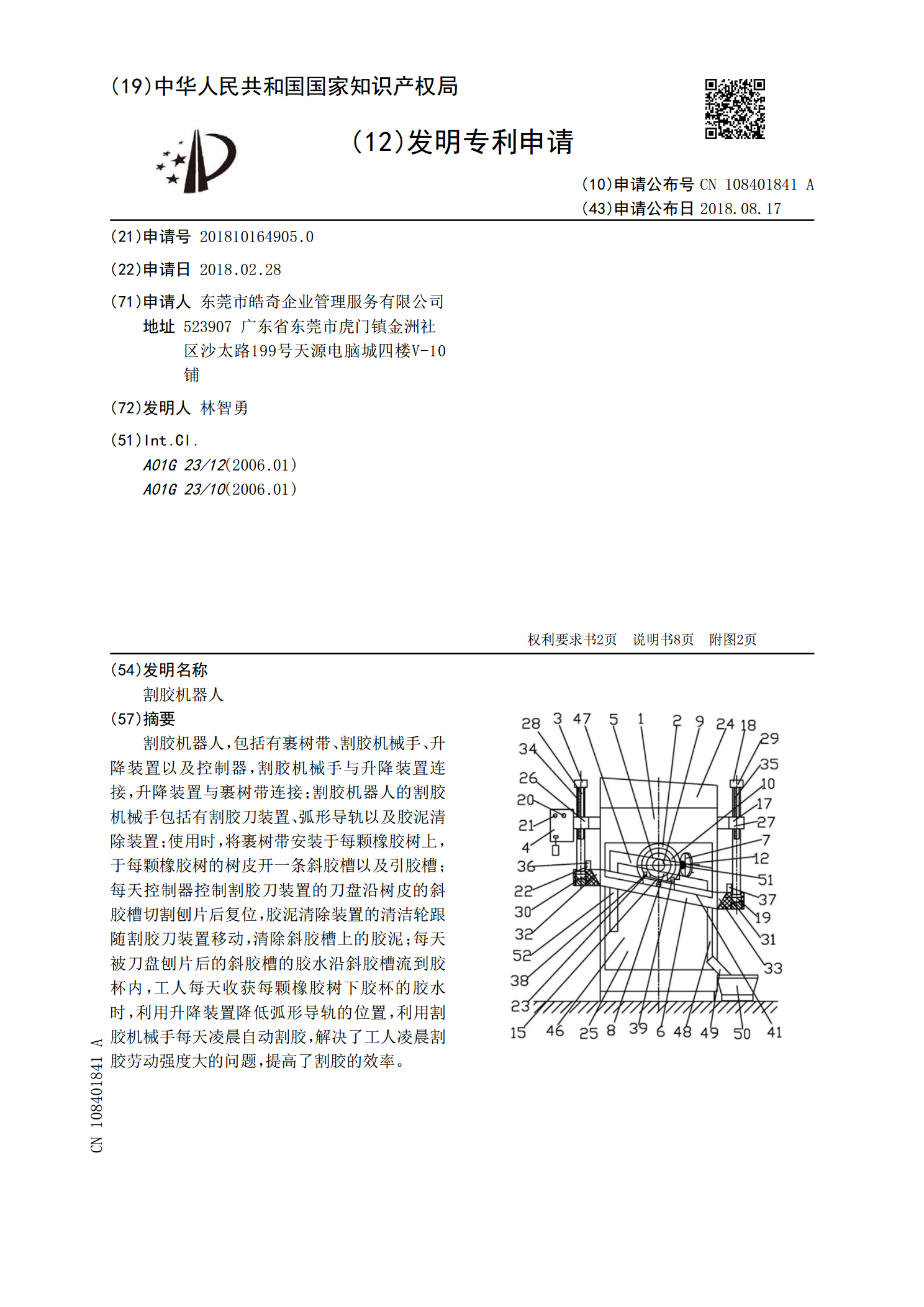
割胶机器人.pdf
割胶机器人,包括有裹树带、割胶机械手、升降装置以及控制器,割胶机械手与升降装置连接,升降装置与裹树带连接;割胶机器人的割胶机械手包括有割胶刀装置、弧形导轨以及胶泥清除装置;使用时,将裹树带安装于每颗橡胶树上,于每颗橡胶树的树皮开一条斜胶槽以及引胶槽;每天控制器控制割胶刀装置的刀盘沿树皮的斜胶槽切割刨片后复位,胶泥清除装置的清洁轮跟随割胶刀装置移动,清除斜胶槽上的胶泥;每天被刀盘刨片后的斜胶槽的胶水沿斜胶槽流到胶杯内,工人每天收获每颗橡胶树下胶杯的胶水时,利用升降装置降低弧形导轨的位置,利用割胶机械手每天凌
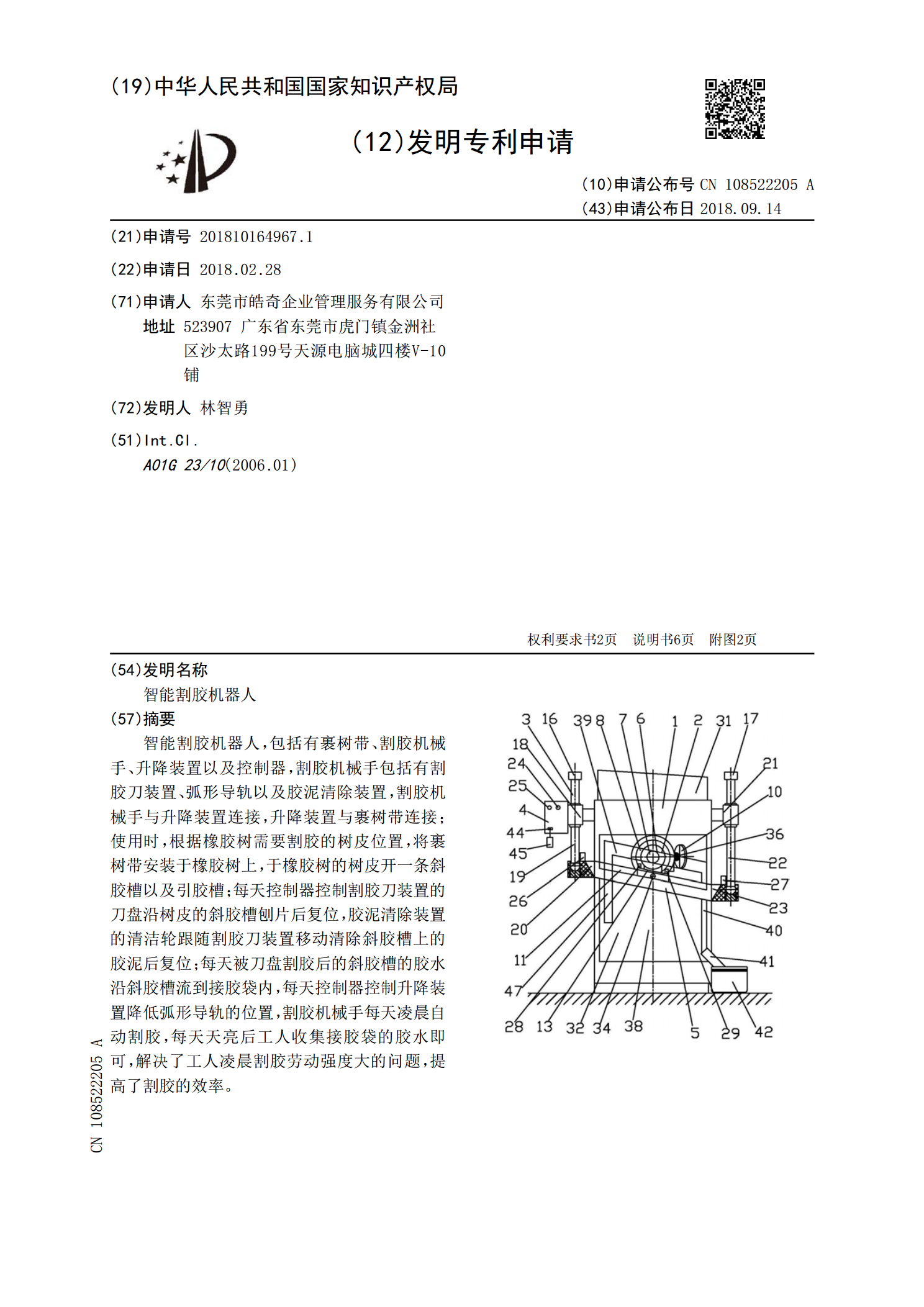
智能割胶机器人.pdf
智能割胶机器人,包括有裹树带、割胶机械手、升降装置以及控制器,割胶机械手包括有割胶刀装置、弧形导轨以及胶泥清除装置,割胶机械手与升降装置连接,升降装置与裹树带连接;使用时,根据橡胶树需要割胶的树皮位置,将裹树带安装于橡胶树上,于橡胶树的树皮开一条斜胶槽以及引胶槽;每天控制器控制割胶刀装置的刀盘沿树皮的斜胶槽刨片后复位,胶泥清除装置的清洁轮跟随割胶刀装置移动清除斜胶槽上的胶泥后复位;每天被刀盘割胶后的斜胶槽的胶水沿斜胶槽流到接胶袋内,每天控制器控制升降装置降低弧形导轨的位置,割胶机械手每天凌晨自动割胶,每天