
智能割胶机器人.pdf

小云****66

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能割胶机器人.pdf
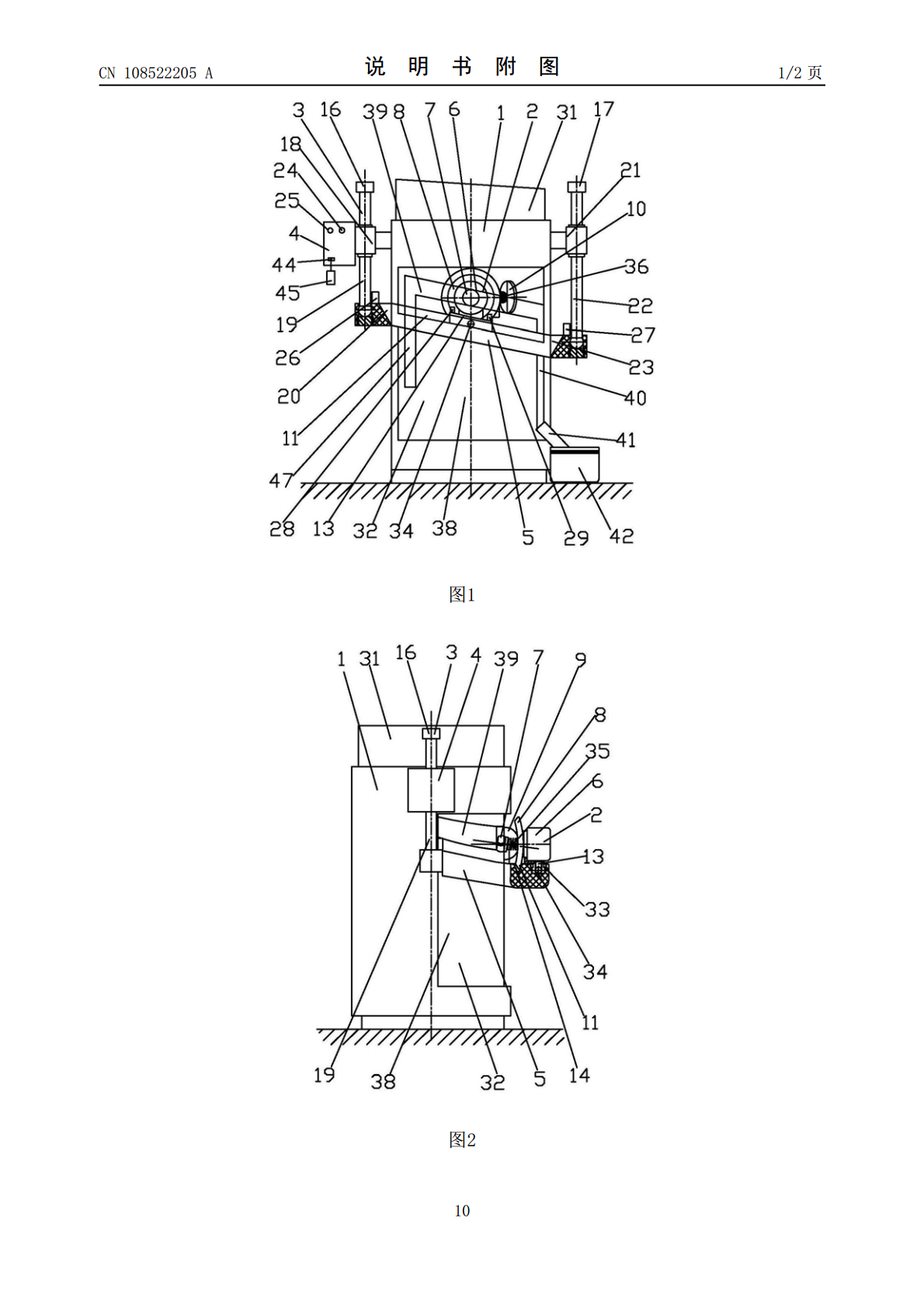
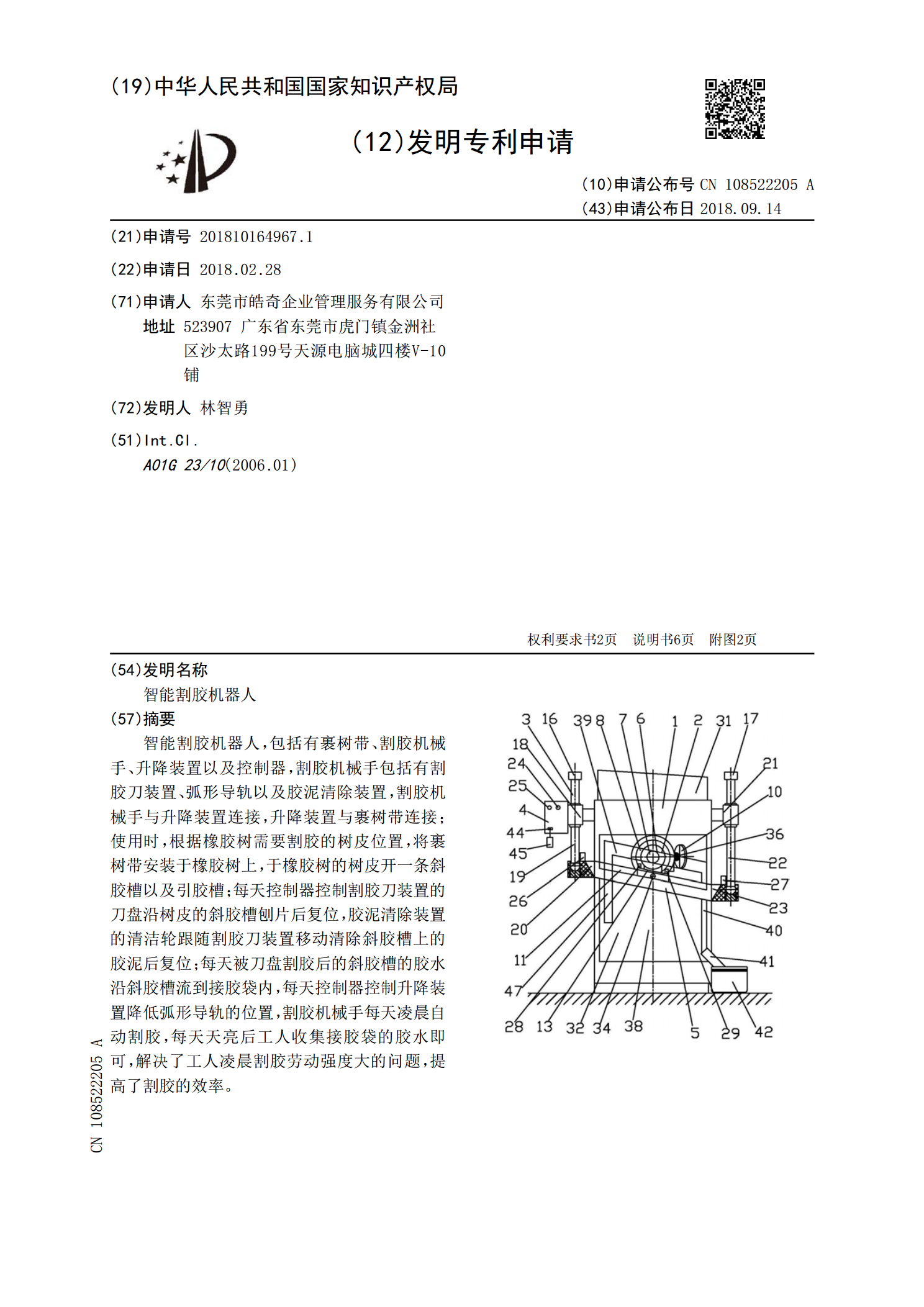
智能割胶机器人,包括有裹树带、割胶机械手、升降装置以及控制器,割胶机械手包括有割胶刀装置、弧形导轨以及胶泥清除装置,割胶机械手与升降装置连接,升降装置与裹树带连接;使用时,根据橡胶树需要割胶的树皮位置,将裹树带安装于橡胶树上,于橡胶树的树皮开一条斜胶槽以及引胶槽;每天控制器控制割胶刀装置的刀盘沿树皮的斜胶槽刨片后复位,胶泥清除装置的清洁轮跟随割胶刀装置移动清除斜胶槽上的胶泥后复位;每天被刀盘割胶后的斜胶槽的胶水沿斜胶槽流到接胶袋内,每天控制器控制升降装置降低弧形导轨的位置,割胶机械手每天凌晨自动割胶,每天
智能割胶机器人的使用方法.pdf
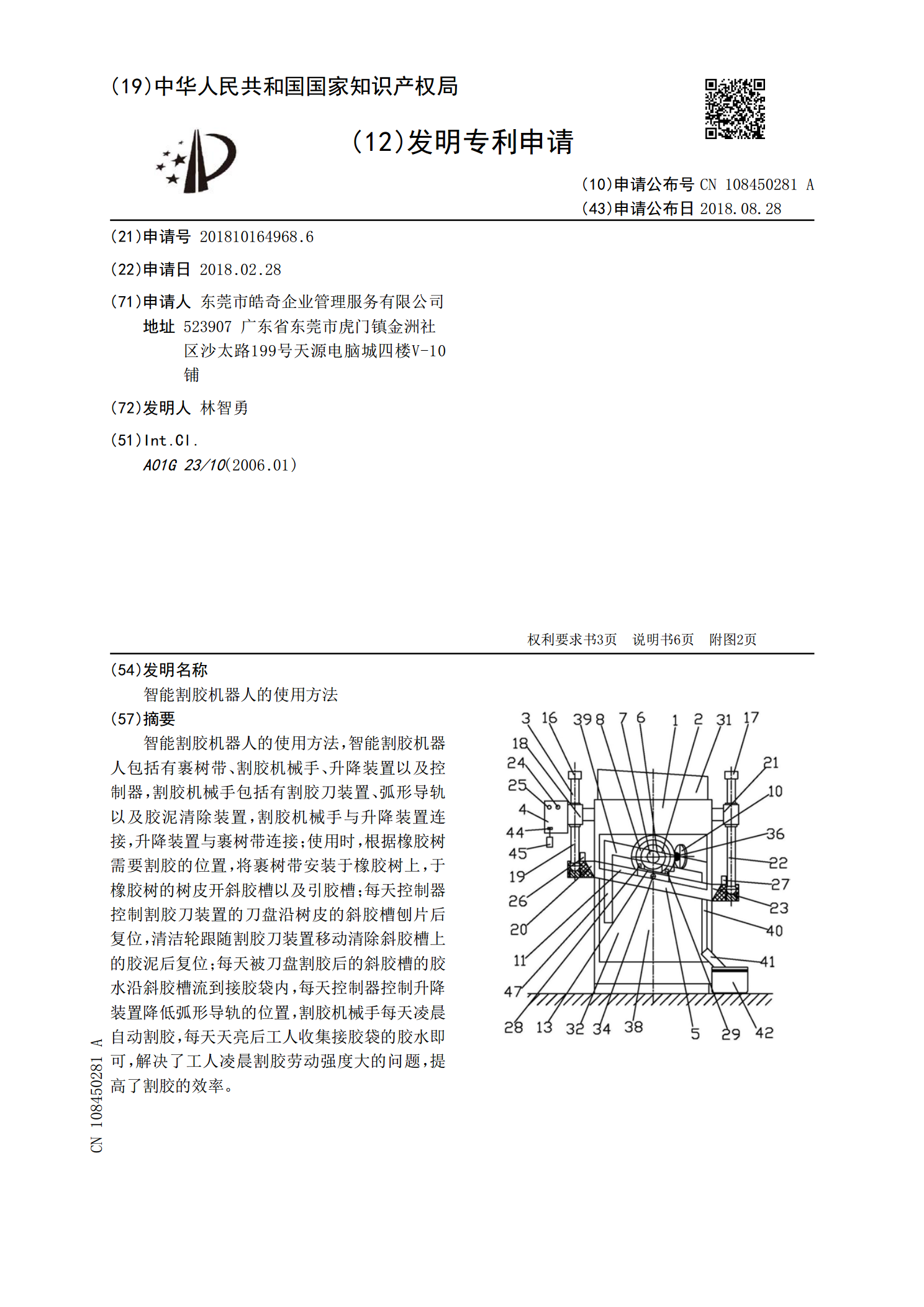
智能割胶机器人的使用方法,智能割胶机器人包括有裹树带、割胶机械手、升降装置以及控制器,割胶机械手包括有割胶刀装置、弧形导轨以及胶泥清除装置,割胶机械手与升降装置连接,升降装置与裹树带连接;使用时,根据橡胶树需要割胶的位置,将裹树带安装于橡胶树上,于橡胶树的树皮开斜胶槽以及引胶槽;每天控制器控制割胶刀装置的刀盘沿树皮的斜胶槽刨片后复位,清洁轮跟随割胶刀装置移动清除斜胶槽上的胶泥后复位;每天被刀盘割胶后的斜胶槽的胶水沿斜胶槽流到接胶袋内,每天控制器控制升降装置降低弧形导轨的位置,割胶机械手每天凌晨自动割胶,每
割胶机器人.pdf
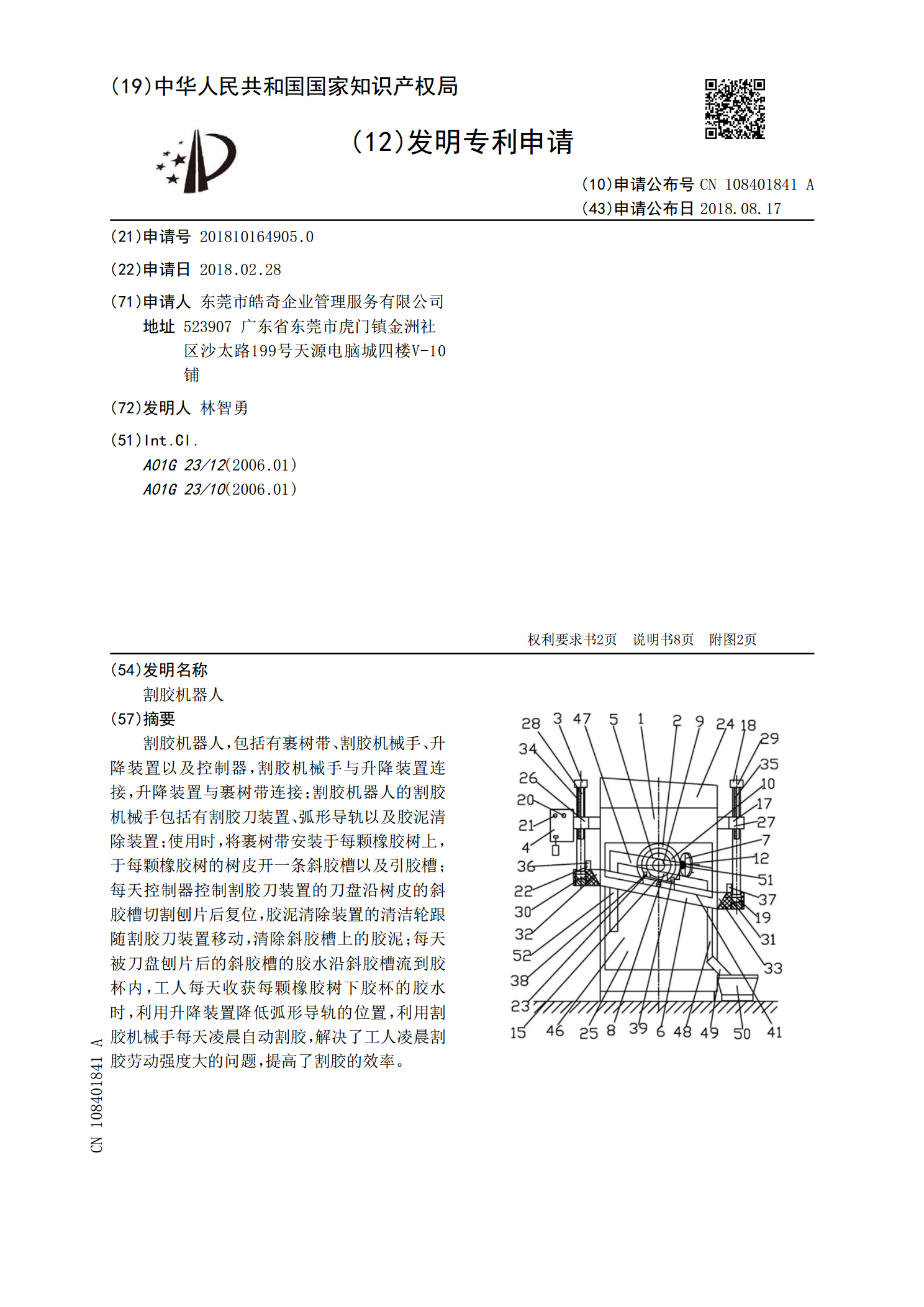
割胶机器人,包括有裹树带、割胶机械手、升降装置以及控制器,割胶机械手与升降装置连接,升降装置与裹树带连接;割胶机器人的割胶机械手包括有割胶刀装置、弧形导轨以及胶泥清除装置;使用时,将裹树带安装于每颗橡胶树上,于每颗橡胶树的树皮开一条斜胶槽以及引胶槽;每天控制器控制割胶刀装置的刀盘沿树皮的斜胶槽切割刨片后复位,胶泥清除装置的清洁轮跟随割胶刀装置移动,清除斜胶槽上的胶泥;每天被刀盘刨片后的斜胶槽的胶水沿斜胶槽流到胶杯内,工人每天收获每颗橡胶树下胶杯的胶水时,利用升降装置降低弧形导轨的位置,利用割胶机械手每天凌
割胶机器人的割胶机械手.pdf
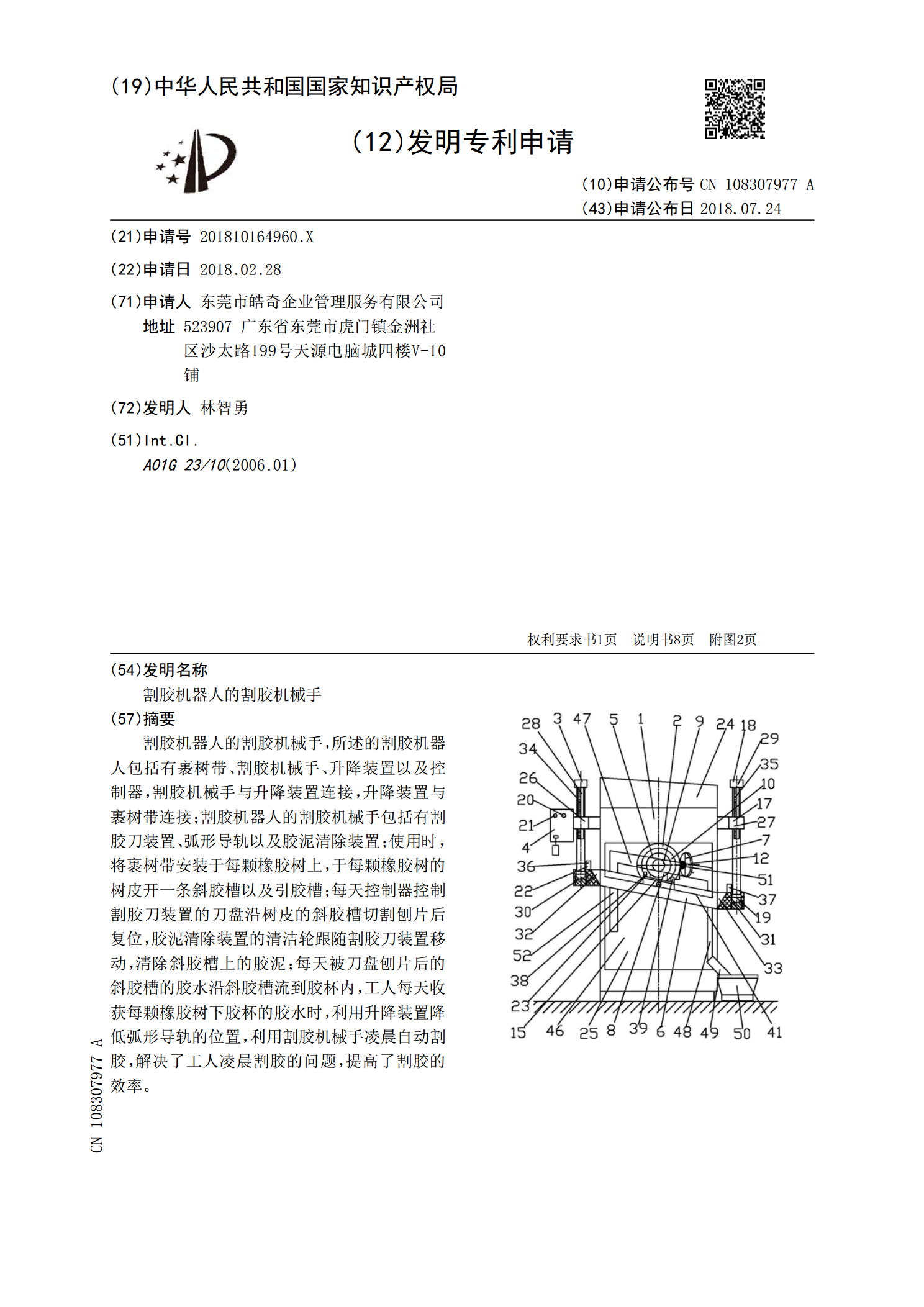
割胶机器人的割胶机械手,所述的割胶机器人包括有裹树带、割胶机械手、升降装置以及控制器,割胶机械手与升降装置连接,升降装置与裹树带连接;割胶机器人的割胶机械手包括有割胶刀装置、弧形导轨以及胶泥清除装置;使用时,将裹树带安装于每颗橡胶树上,于每颗橡胶树的树皮开一条斜胶槽以及引胶槽;每天控制器控制割胶刀装置的刀盘沿树皮的斜胶槽切割刨片后复位,胶泥清除装置的清洁轮跟随割胶刀装置移动,清除斜胶槽上的胶泥;每天被刀盘刨片后的斜胶槽的胶水沿斜胶槽流到胶杯内,工人每天收获每颗橡胶树下胶杯的胶水时,利用升降装置降低弧形导轨
自动割胶机器人.pdf
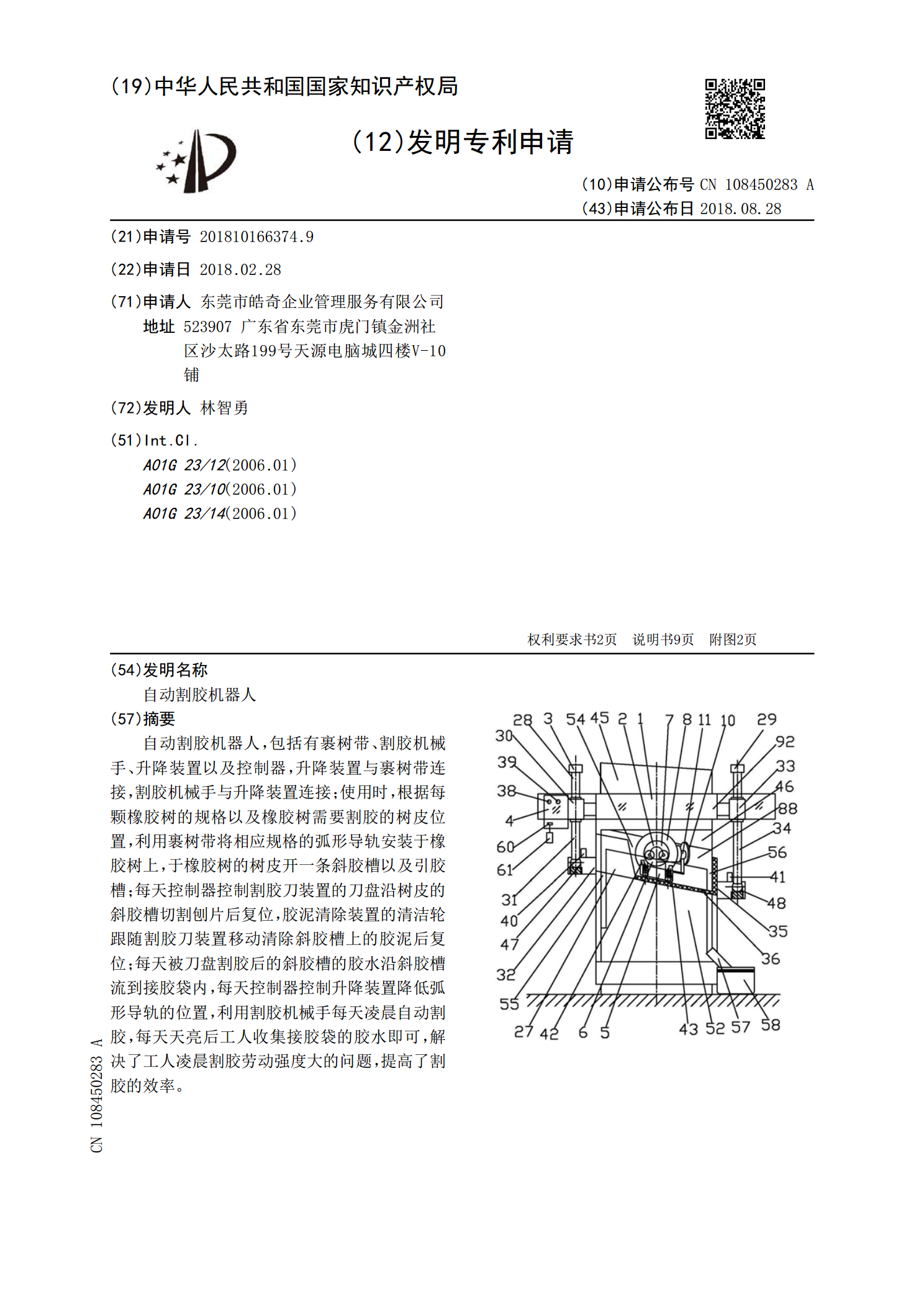
自动割胶机器人,包括有裹树带、割胶机械手、升降装置以及控制器,升降装置与裹树带连接,割胶机械手与升降装置连接;使用时,根据每颗橡胶树的规格以及橡胶树需要割胶的树皮位置,利用裹树带将相应规格的弧形导轨安装于橡胶树上,于橡胶树的树皮开一条斜胶槽以及引胶槽;每天控制器控制割胶刀装置的刀盘沿树皮的斜胶槽切割刨片后复位,胶泥清除装置的清洁轮跟随割胶刀装置移动清除斜胶槽上的胶泥后复位;每天被刀盘割胶后的斜胶槽的胶水沿斜胶槽流到接胶袋内,每天控制器控制升降装置降低弧形导轨的位置,利用割胶机械手每天凌晨自动割胶,每天天亮