
一种多节电缆管道疏通机器人的设计研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多节电缆管道疏通机器人的设计研究的任务书.docx
一种多节电缆管道疏通机器人的设计研究的任务书任务书一种多节电缆管道疏通机器人的设计研究任务概述随着时间的推移,地下电缆管道系统建设规模逐年扩大,然而,一些因天灾、损坏等原因导致管道内电缆出现各种故障,而且由于管道深埋、纵向距离较长、制约设备操作,再加上因地形原因需要使用手动反复挑选不同大小的疏通设备进行作业,进而影响到故障排除进程。为了解决这些问题,需要一种高效便捷的疏通机器人,本项目针对于这一需求,目的是设计一些高效、便捷并且具有灵活机动性的多节电缆管道疏通机器人。任务背景由于地下电缆管道系统这样的特殊

电缆排管疏通机器人设备的设计研究的任务书.docx
电缆排管疏通机器人设备的设计研究的任务书一、背景随着电缆排管在现代建筑、轨道交通、工业制造等领域中的广泛应用,电缆排管的清理和维护工作变得越来越重要。传统的清理方式往往需要人工操作,不仅效率低下、费时费力,而且还存在一些安全隐患。因此,为了提高清理工作的效率和安全性,研发一种电缆排管疏通机器人设备是十分必要的。二、任务本次研究的任务是设计一种电缆排管疏通机器人设备,实现对电缆排管的快速清理和维护,提高清理工作的效率和安全性。具体任务如下:1.对电缆排管疏通机器人的相关技术进行调研,了解市场上已有的设备类型
一种电缆管道疏通装置.pdf
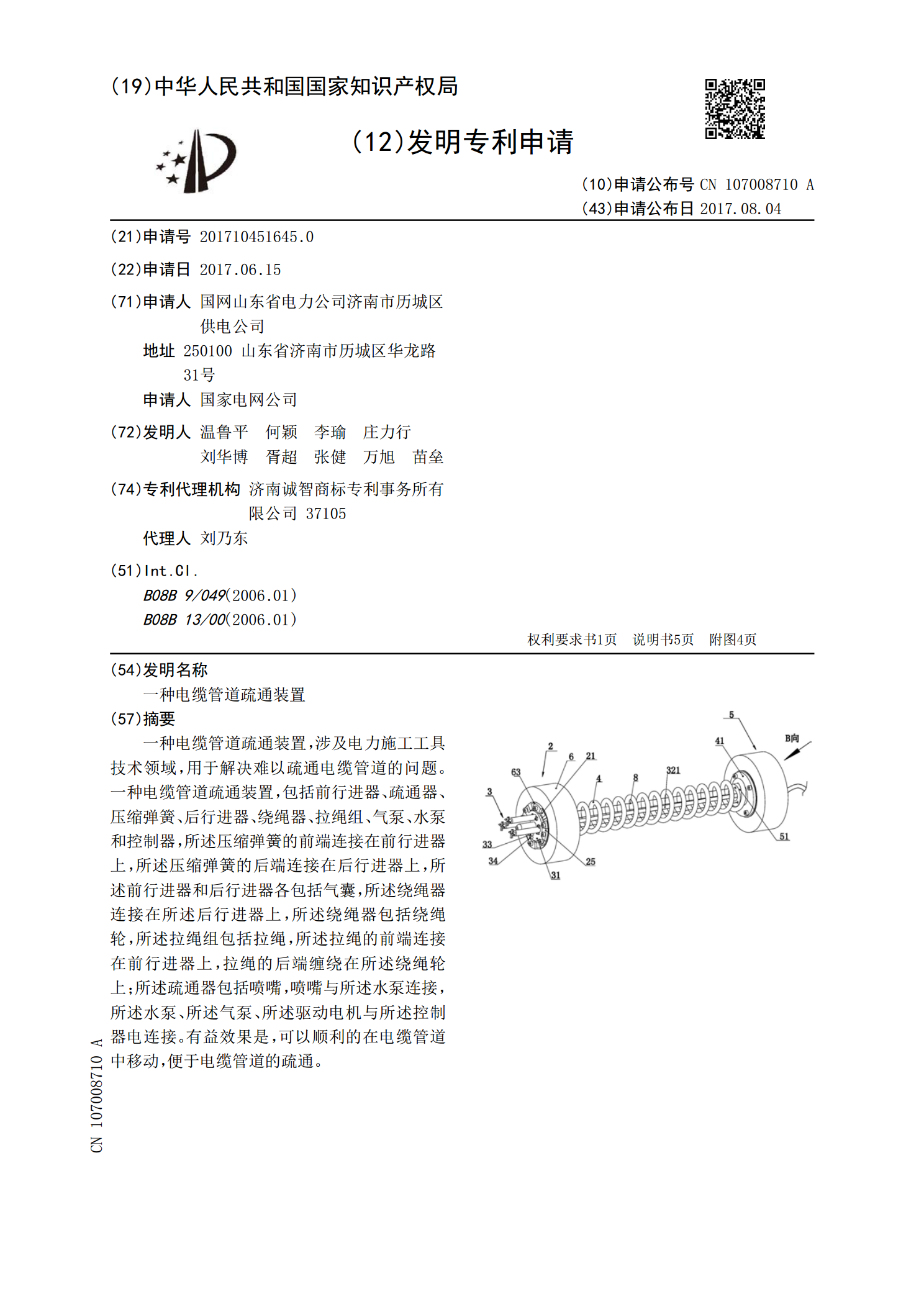
一种电缆管道疏通装置,涉及电力施工工具技术领域,用于解决难以疏通电缆管道的问题。一种电缆管道疏通装置,包括前行进器、疏通器、压缩弹簧、后行进器、绕绳器、拉绳组、气泵、水泵和控制器,所述压缩弹簧的前端连接在前行进器上,所述压缩弹簧的后端连接在后行进器上,所述前行进器和后行进器各包括气囊,所述绕绳器连接在所述后行进器上,所述绕绳器包括绕绳轮,所述拉绳组包括拉绳,所述拉绳的前端连接在前行进器上,拉绳的后端缠绕在所述绕绳轮上;所述疏通器包括喷嘴,喷嘴与所述水泵连接,所述水泵、所述气泵、所述驱动电机与所述控制器电连

一种管道疏通机器人.pdf
本发明的一种管道疏通机器人,包括主体、第一环形安装架和第二环形安装架、刀片和刀片齿轮马达、钻头和钻头齿轮马达、六个高压水缸和六个驱动齿轮马达、十二个行走轮。本发明全部由高水压驱动,不需要电力驱动,从而能够适应管道内部复杂的工作环境;通过设置有高压水缸,在高水压缸的作用下,行走轮可产生较大的压力,贴紧在管道壁面上,从而使本发明可以适应一定范围内管径的管道。
一种推进式管道疏通机器人的设计方法.pdf
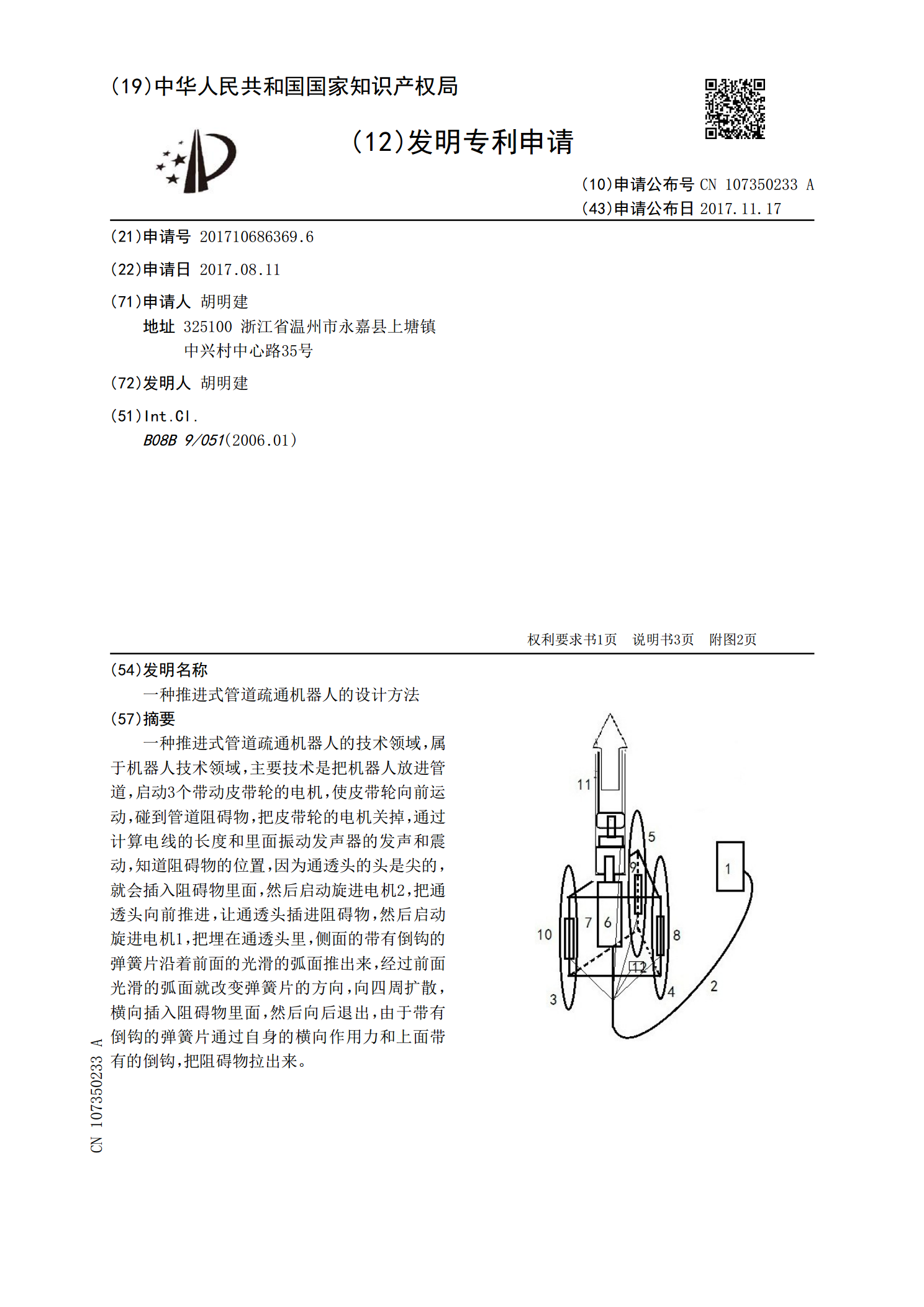
一种推进式管道疏通机器人的技术领域,属于机器人技术领域,主要技术是把机器人放进管道,启动3个带动皮带轮的电机,使皮带轮向前运动,碰到管道阻碍物,把皮带轮的电机关掉,通过计算电线的长度和里面振动发声器的发声和震动,知道阻碍物的位置,因为通透头的头是尖的,就会插入阻碍物里面,然后启动旋进电机2,把通透头向前推进,让通透头插进阻碍物,然后启动旋进电机1,把埋在通透头里,侧面的带有倒钩的弹簧片沿着前面的光滑的弧面推出来,经过前面光滑的弧面就改变弹簧片的方向,向四周扩散,横向插入阻碍物里面,然后向后退出,由于带有倒