
三维相干调频连续波激光雷达速度提取与成像畸变补偿技术研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

三维相干调频连续波激光雷达速度提取与成像畸变补偿技术研究的任务书.docx
三维相干调频连续波激光雷达速度提取与成像畸变补偿技术研究的任务书一、选题背景激光雷达(Lidar)技术作为一种高精度、高分辨率的遥感技术,被广泛应用于地球物理探测、环境监测、智能交通等多个领域。在这些领域应用中,激光雷达的输出一般是点云数据,而点云数据需要通过对点云进行处理,提取出目标(如建筑物、行人等)的位置、速度等信息,才能为后续任务提供决策支持。其中,速度信息是非常重要的,它可以用于行人、交通工具等目标的运动分析,也可以用于环境监测中的塌方、崩塌等自然灾害的预警。在激光雷达中,速度信息是通过Dopp

相干调频连续波激光雷达畸变补偿技术研究.docx
相干调频连续波激光雷达畸变补偿技术研究标题:相干调频连续波激光雷达畸变补偿技术研究摘要:相干调频连续波激光雷达(coherentfrequencymodulationcontinuouswaveradar,CFM-CW)是一种新兴的激光雷达技术,具有高分辨率、长测距范围等优点。然而,由于光学部分等多种因素的影响,CFM-CW激光雷达在实际应用中常常出现畸变问题。为此,本文探讨了相干调频连续波激光雷达畸变补偿技术的研究,并提出了一种基于传输矩阵法的补偿方法。通过对比实验数据与补偿后的数据,验证了该方法的有效

基于调频连续波原理的三维成像激光雷达系统.docx
基于调频连续波原理的三维成像激光雷达系统一、引言随着激光雷达技术的快速发展,三维成像激光雷达系统在地图制图、自动驾驶、机器人导航等领域中得到了广泛的应用。在激光雷达中,通过发射激光束并测量其返回时间,可以获取目标物体的距离和位置信息,从而实现三维成像。不同的激光雷达技术有着各自的优势和应用场景。其中,基于调频连续波原理的三维成像激光雷达系统具有高分辨率、高抗干扰性、低功耗等优点,在自动驾驶、导航、机器人等领域中具有广泛的应用前景。本文将会讨论基于调频连续波原理的三维成像激光雷达系统的工作原理、硬件组成以及
一种三波束全光纤相干调频连续波激光雷达.pdf
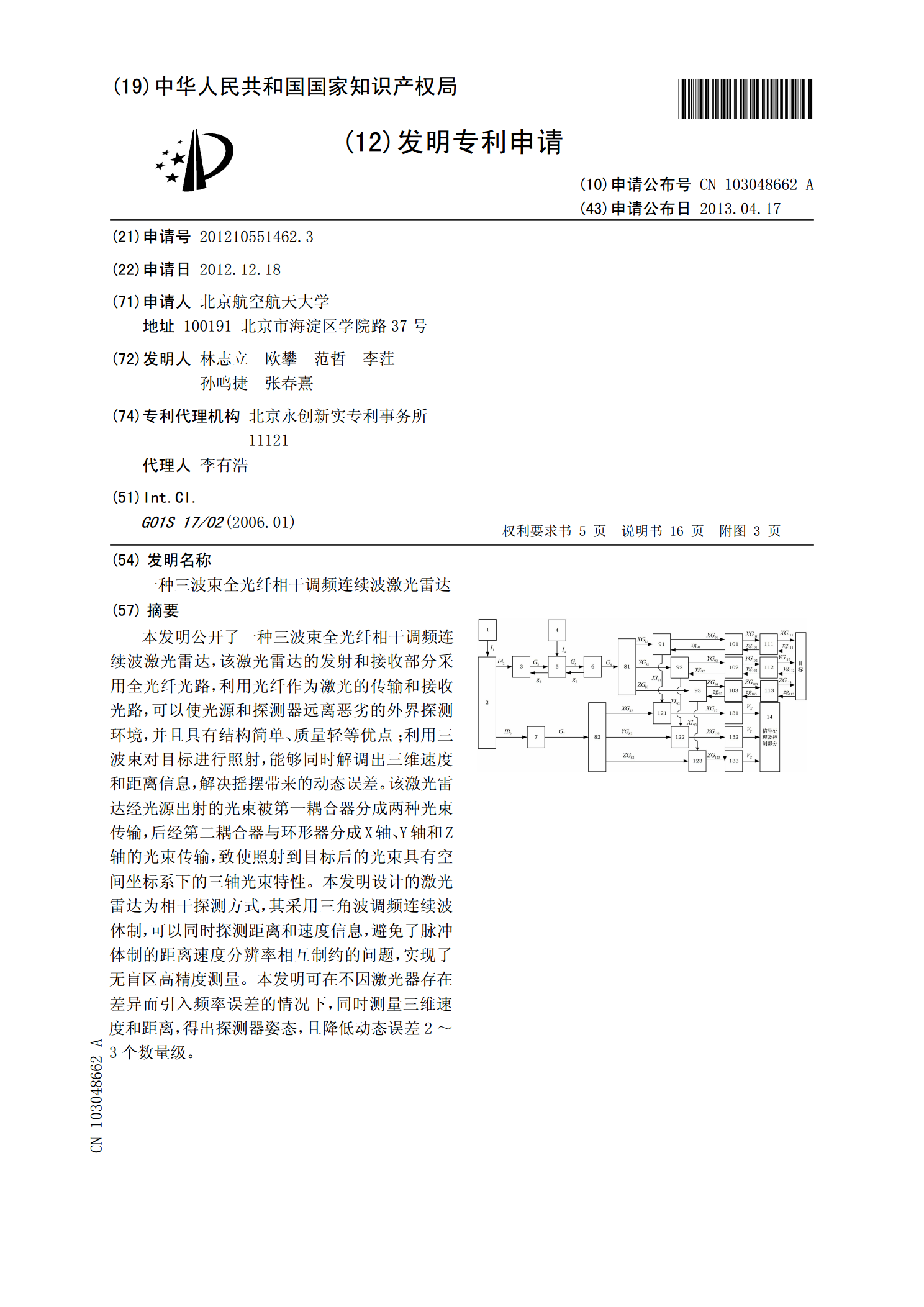
本发明公开了一种三波束全光纤相干调频连续波激光雷达,该激光雷达的发射和接收部分采用全光纤光路,利用光纤作为激光的传输和接收光路,可以使光源和探测器远离恶劣的外界探测环境,并且具有结构简单、质量轻等优点;利用三波束对目标进行照射,能够同时解调出三维速度和距离信息,解决摇摆带来的动态误差。该激光雷达经光源出射的光束被第一耦合器分成两种光束传输,后经第二耦合器与环形器分成X轴、Y轴和Z轴的光束传输,致使照射到目标后的光束具有空间坐标系下的三轴光束特性。本发明设计的激光雷达为相干探测方式,其采用三角波调频连续波体

调频连续波雷达自旋目标干涉三维成像方法.docx
调频连续波雷达自旋目标干涉三维成像方法调频连续波雷达(FMCW)是一种常用的雷达工作模式,它能够提供高分辨率的目标信息。自旋目标通常指的是旋转或自旋的目标,例如飞机、车辆和人体。目标干涉三维成像是通过分析目标返回的多个时刻的信号,从而获得目标的三维空间位置和形状信息的方法。本文将介绍调频连续波雷达自旋目标干涉三维成像方法的基本原理与实现步骤,并讨论其在实际应用中存在的挑战和改进方法。一、调频连续波雷达自旋目标干涉三维成像方法的基本原理1.调频连续波雷达工作原理调频连续波雷达是一种连续调频信号作为发射信号的