
大规模车载激光点云数据组织及可视化研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

大规模车载激光点云数据组织及可视化研究.pptx
汇报人:/目录0102研究背景研究意义研究目的03研究内容研究方法实验设计04数据采集与预处理数据结构化与索引数据压缩与存储数据安全与隐私保护05可视化算法原理可视化算法实现可视化效果评估可视化技术应用场景06实验结果展示结果分析结果比较与讨论性能评估与优化07研究结论研究创新点研究不足与展望汇报人:

大规模车载激光点云数据组织及可视化研究.docx
大规模车载激光点云数据组织及可视化研究摘要随着汽车自动驾驶技术的发展,车载激光雷达作为一种获取道路信息的重要手段,被越来越广泛地应用。然而,车载激光雷达所获取的大规模点云数据,其数据量巨大、噪声较多、缺失值较多、数据形态复杂等问题使得对其处理和可视化具有一定挑战性。在本文中,我们将对车载激光点云数据的组织及可视化进行研究,以期为自动驾驶等领域的相关研究提供一些帮助。关键词:车载激光雷达;点云数据;组织;可视化;自动驾驶1.引言自动驾驶技术的发展为交通运输领域带来了巨大的变化。而车载激光雷达作为其中的重要组

海量车载激光点云组织与可视化研究.docx
海量车载激光点云组织与可视化研究海量车载激光点云组织与可视化研究摘要:激光点云是在车载激光雷达扫描下得到的三维空间的点云数据。由于其高精度和准确性,车载激光点云被广泛用于自动驾驶、地图构建和环境感知等领域。然而,由于车载激光点云数据量极大,且存在噪声和无效点等问题,如何高效地组织和可视化成为研究的关键问题。本文对现有的海量车载激光点云组织与可视化方法进行了综述,并提出了一种基于分层聚类和改进的体素化方法的点云组织与可视化方案。通过对大规模车载激光点云数据进行实验评估,结果表明,该方法在数据组织和可视化方面
一种机载激光点云数据与车载激光点云数据融合方法.pdf
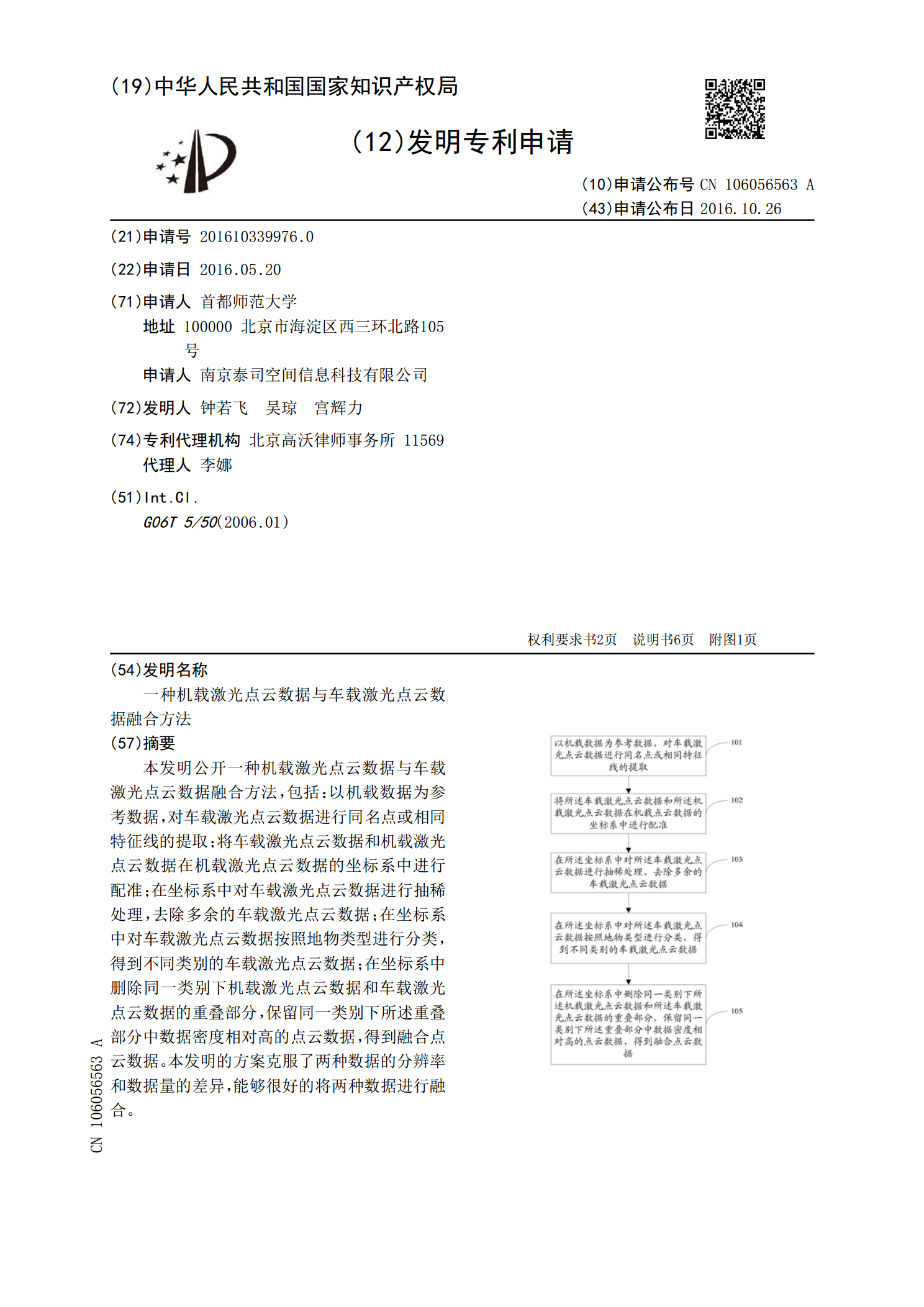
本发明公开一种机载激光点云数据与车载激光点云数据融合方法,包括:以机载数据为参考数据,对车载激光点云数据进行同名点或相同特征线的提取;将车载激光点云数据和机载激光点云数据在机载激光点云数据的坐标系中进行配准;在坐标系中对车载激光点云数据进行抽稀处理,去除多余的车载激光点云数据;在坐标系中对车载激光点云数据按照地物类型进行分类,得到不同类别的车载激光点云数据;在坐标系中删除同一类别下机载激光点云数据和车载激光点云数据的重叠部分,保留同一类别下所述重叠部分中数据密度相对高的点云数据,得到融合点云数据。本发明的

车载全景影像与激光点云数据配准方法研究.docx
车载全景影像与激光点云数据配准方法研究随着车载全景影像和激光点云数据的广泛应用,如何实现两种数据的精确配准成为了研究热点。本文将介绍车载全景影像和激光点云数据配准的基本原理和方法。一、车载全景影像与激光点云数据的特点车载全景影像是通过激光雷达和高清摄像头等传感器获取的场景全景影像,其具有短时间内获取大量数据、可视化效果好、信息量丰富等特点。而激光点云数据则是通过激光测距仪等设备获取目标表面上的三维坐标点云数据,其具有高精度、能够实现对目标的详细量化分析等优势。二、车载全景影像与激光点云数据配准的基本原理车