
多机器人系统路径规划方法研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多机器人系统路径规划方法研究.docx
多机器人系统路径规划方法研究随着机器人技术的不断发展,多机器人系统在各种领域中得到了广泛的应用,例如制造业、物流配送、农业等。在多机器人系统中,机器人需要完成多个任务,这就需要对机器人进行路径规划,以实现高效率、高质量的任务完成。本文就多机器人系统路径规划方法进行研究,探讨多个机器人之间的协作,以及如何优化路径规划。一、多机器人路径规划方案在多机器人系统中,路径规划需要调动多个机器人同时进行配合,协同完成任务。在多机器人系统中,通常会出现以下路径规划的几种情况:1.协同路径规划协同路径规划是指多个机器人同

多机器人系统路径规划方法研究的开题报告.docx
多机器人系统路径规划方法研究的开题报告1.研究背景和意义随着机器人技术的不断进步,多机器人系统应用越来越广泛。多机器人系统具有并行性能好,协同工作能力强等优点。但是,在实际应用中,机器人路径规划是一个难点问题。因为在多机器人系统中,需要解决多个机器人同时运动的问题,以及协同工作时机器人之间的冲突和撞击问题。因此,研究多机器人系统路径规划方法具有重要意义。2.研究现状目前多机器人系统的路径规划方法主要有两类:集中式路径规划和分布式路径规划。集中式路径规划是指将所有机器人的路径规划问题集中到一个中心节点,由该
多机器人路径规划方法、多机器人系统及机器人.pdf
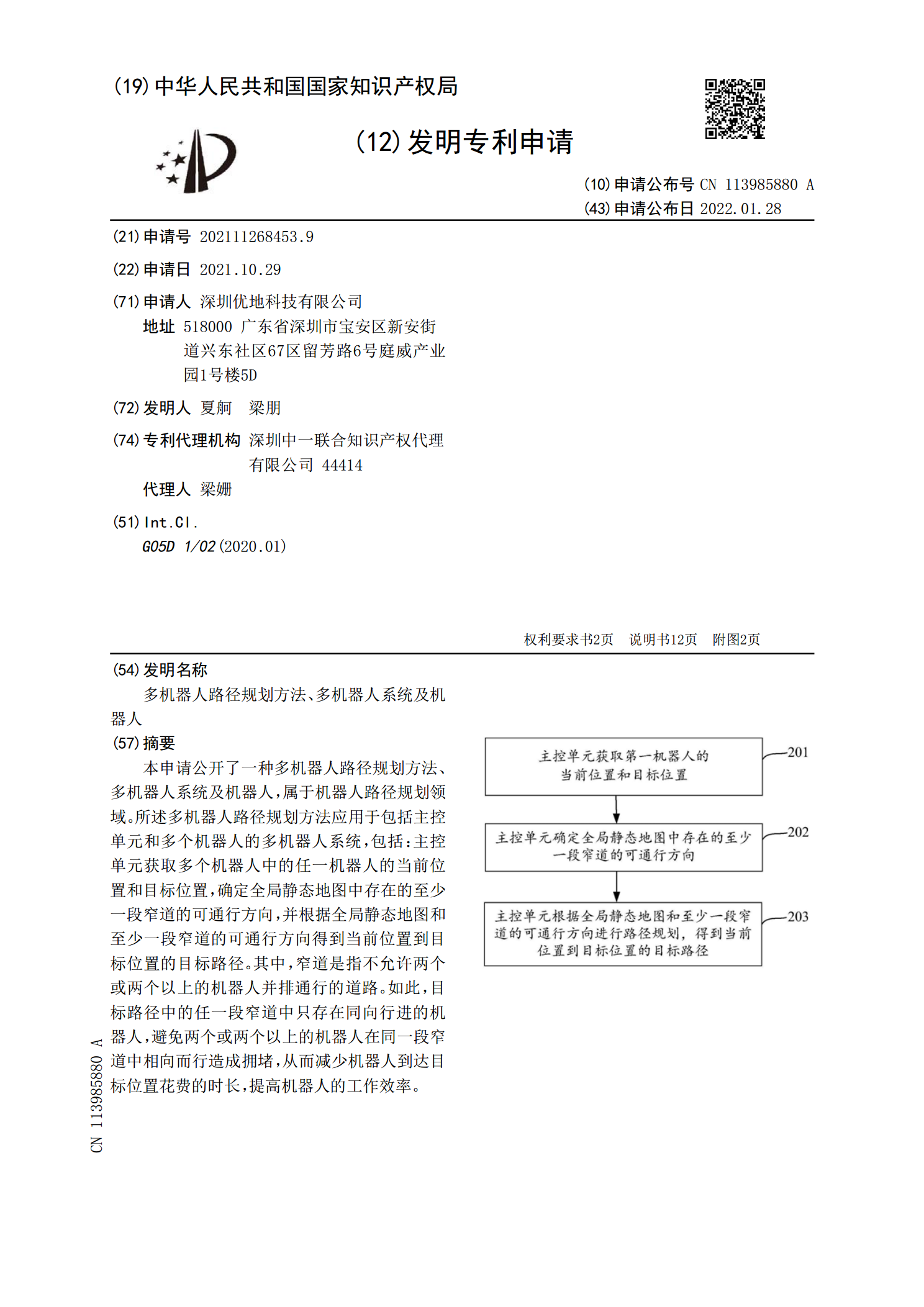
本申请公开了一种多机器人路径规划方法、多机器人系统及机器人,属于机器人路径规划领域。所述多机器人路径规划方法应用于包括主控单元和多个机器人的多机器人系统,包括:主控单元获取多个机器人中的任一机器人的当前位置和目标位置,确定全局静态地图中存在的至少一段窄道的可通行方向,并根据全局静态地图和至少一段窄道的可通行方向得到当前位置到目标位置的目标路径。其中,窄道是指不允许两个或两个以上的机器人并排通行的道路。如此,目标路径中的任一段窄道中只存在同向行进的机器人,避免两个或两个以上的机器人在同一段窄道中相向而行造成

多机器人系统的动态路径规划方法研究的任务书.docx
多机器人系统的动态路径规划方法研究的任务书任务书项目背景多机器人系统在工业自动化、协作探索、环境监测等领域应用广泛,其具有高效性、鲁棒性和全局优化的特点。在多机器人系统中,路径规划是一项重要任务,它能够有效提高系统的运行效率和可靠性。传统的路径规划方法无法满足多机器人系统的要求,因此需要更为高效、智能的动态路径规划方法。项目任务本项目旨在研究多机器人系统的动态路径规划方法,主要任务如下:1.研究多机器人系统的运动学模型,建立机器人运动模型和环境模型。2.研发适用于多机器人系统的路径规划算法,包括基于规划框

多主体机器人路径规划方法研究.docx
多主体机器人路径规划方法研究随着机器人技术的迅速发展,多主体机器人正在成为机器人领域内的一个热门领域。多主体机器人不仅具有传统单主体机器人的优点,如高效、精确、可靠等,而且还可以协同合作完成更为复杂的任务。然而,多主体机器人的路径规划问题是一个非常复杂的问题,需要考虑多个机器人之间的相互作用,以及在动态环境中的适应性。本论文将就多主体机器人路径规划的方法和研究进行探讨。一、多主体机器人路径规划方法的分类多主体机器人路径规划方法主要可以分为集中式路径规划和分散式路径规划两种。(1)集中式路径规划集中式路径规