
室外场景三维点云数据的分割与分类的任务书.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

室外场景三维点云数据的分割与分类的任务书.docx
室外场景三维点云数据的分割与分类的任务书任务背景:室外场景的三维点云数据分割与分类是计算机视觉领域中一个重要的任务,与城市规划、自动驾驶等相关应用息息相关。由于室外场景点云数据具有丰富的空间信息,可以提供大量有用的场景、建筑以及道路信息,因此点云分割与分类技术的发展对于优化城市规划及增加自动驾驶安全性具有重要的意义。任务描述:本次任务旨在完成对室外场景3D点云数据的分割与分类问题。要求使用深度学习中的一些常用模型,如PointNet,PointNet++等模型,进行点云数据的分类,分割等任务。主要包括以下

基于三维激光点云的室外场景分割与分类的任务书.docx
基于三维激光点云的室外场景分割与分类的任务书任务书一、任务背景与目的随着激光扫描技术的快速发展,三维激光点云成为室外场景建模与感知的重要数据来源。在室外场景中,点云数据通常包含丰富的信息,包括建筑物、道路、车辆、行人等多种目标,并且点云数据在感知、导航和自动驾驶等领域中发挥着重要作用。然而,由于点云数据的密集性和无序性,对点云数据进行分割和分类变得具有挑战性。因此,本次任务的目的是基于三维激光点云实现室外场景的分割与分类,通过对点云数据的处理和分析,对室外场景中的不同对象进行自动化的识别与分类。二、任务内

基于三维激光点云的室外场景分割与分类的开题报告.docx
基于三维激光点云的室外场景分割与分类的开题报告一、研究背景目前,越来越多的城市、道路、建筑等公共设施的建设已经使得室外环境景象非常复杂,特别是在城市边缘地区,往往会涉及到大片的自然地貌。如何对这些地貌景象进行有效的分割和分类便成为一个十分实用的问题。而三维激光点云可以在高精度下捕捉目标表面的形状信息,因此被广泛地应用于物体识别、场景还原等应用领域。二、研究目的本研究主要旨在基于三维激光点云,通过算法设计和实现,实现对室外场景的自主分割和分类。三、研究内容1、数据采集在该研究中,需要使用到激光雷达进行室外数

三维彩色点云数据的分割与分类的任务书.docx
三维彩色点云数据的分割与分类的任务书任务书:三维彩色点云数据的分割与分类一、任务描述本次任务是对三维彩色点云数据进行分割及分类,旨在通过计算机视觉技术实现对现实场景中的三维对象进行准确分割和分类。具体任务包括:1.采集三维点云数据第一步是采集三维彩色点云数据,需要借助3D扫描仪、激光雷达、深度相机等设备对目标场景进行扫描,得到点云数据集。2.对点云数据进行预处理由于采集所得的点云数据集存在噪点、无序等问题,因此需要对其进行预处理,如滤波、重采样、去噪等操作,提高点云数据质量。3.点云数据的分割与分类基于预
点云数据的分割与分类.pdf
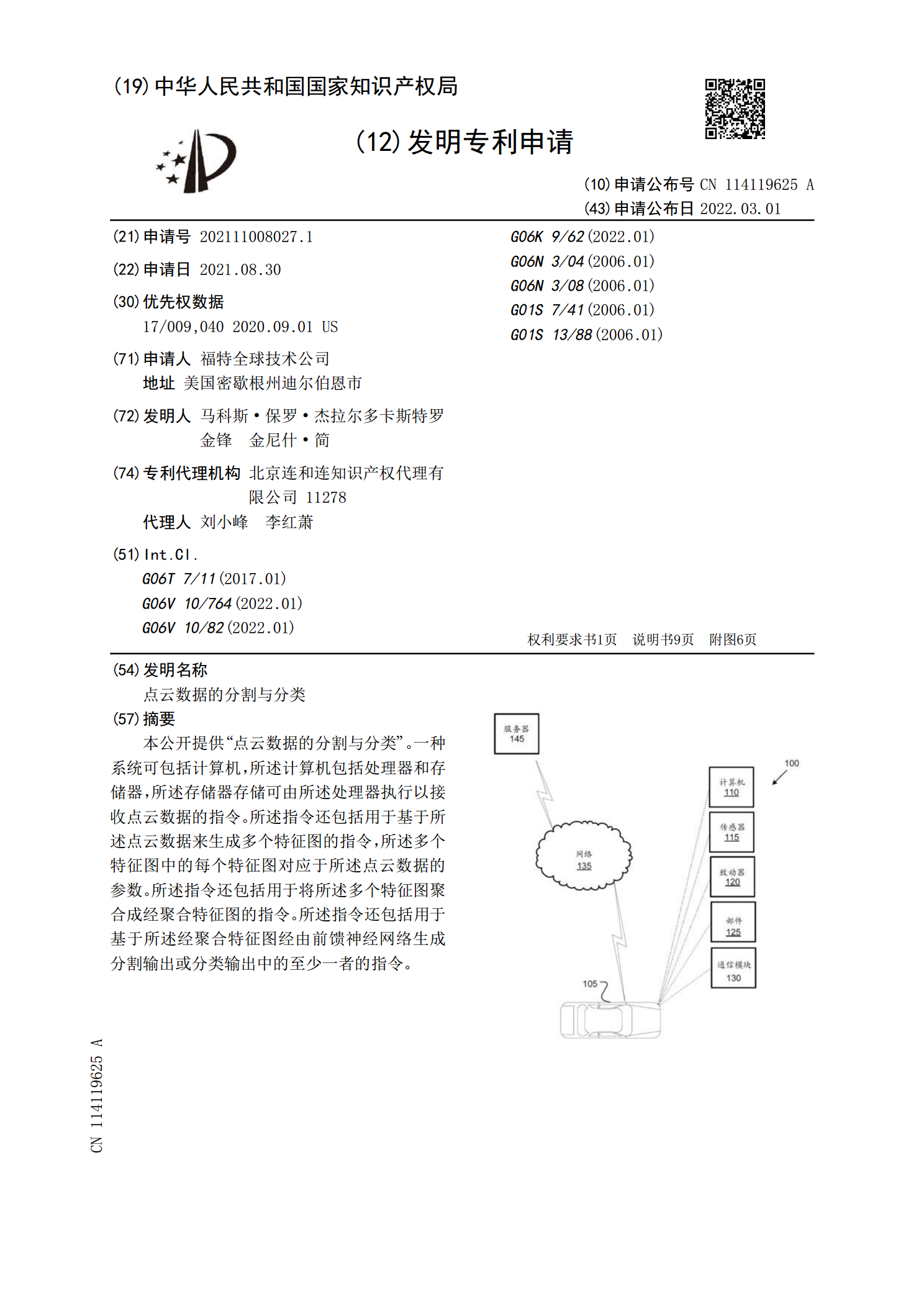
本公开提供“点云数据的分割与分类”。一种系统可包括计算机,所述计算机包括处理器和存储器,所述存储器存储可由所述处理器执行以接收点云数据的指令。所述指令还包括用于基于所述点云数据来生成多个特征图的指令,所述多个特征图中的每个特征图对应于所述点云数据的参数。所述指令还包括用于将所述多个特征图聚合成经聚合特征图的指令。所述指令还包括用于基于所述经聚合特征图经由前馈神经网络生成分割输出或分类输出中的至少一者的指令。