
面向伺服阀力矩马达装调的显微视觉检测研究的开题报告.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

面向伺服阀力矩马达装调的显微视觉检测研究的开题报告.docx
面向伺服阀力矩马达装调的显微视觉检测研究的开题报告一、研究背景和意义在工业和农业生产中,伺服阀力矩马达被广泛应用。由于伺服阀力矩马达运动机构复杂,零件精细,使用寿命长,故障率低,操作精度高等特点,其应用范围越来越广泛。然而,在伺服阀力矩马达的装调过程中,需要对其进行力矩参数的测量和调整。传统的测量方法主要是依靠人工对其进行观察和调整,这种方法存在经验依赖性强、数据不准确、操作繁琐等缺点,严重影响了伺服阀力矩马达的装调效率和质量。因此,利用显微视觉检测技术对伺服阀力矩马达进行测量和调整,具有高效、准确、可靠

面向伺服阀力矩马达装调的显微视觉检测研究.docx
面向伺服阀力矩马达装调的显微视觉检测研究摘要:伺服阀力矩马达是工业机械中常用的执行元件之一,其调节准确性和稳定性对于机械系统的正常运行至关重要。而显微视觉检测技术作为一种高精度的检测手段,在伺服阀力矩马达装调中具有重要作用。本文系统地研究了显微视觉检测技术在伺服阀力矩马达装调中的应用,包括显微视觉检测系统的结构和原理、图像处理算法的设计和开发、显微视觉检测技术在伺服阀力矩马达装调中的应用实例等。通过实验验证了显微视觉检测技术在伺服阀力矩马达装调中的有效性和可行性,并对未来的研究方向进行了展望。关键词:伺服
耐冲击抗振动伺服阀力矩马达结构.pdf
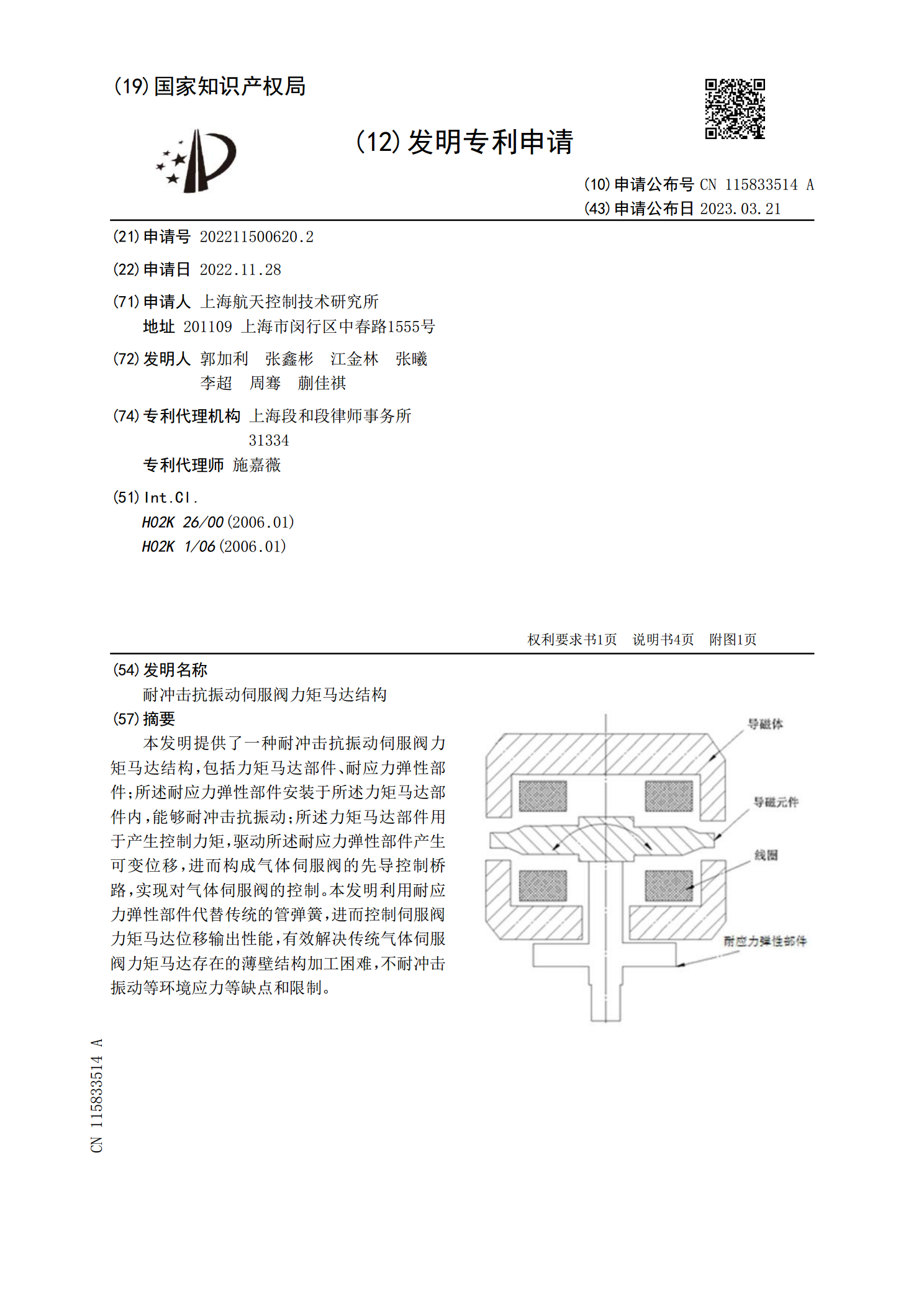
本发明提供了一种耐冲击抗振动伺服阀力矩马达结构,包括力矩马达部件、耐应力弹性部件;所述耐应力弹性部件安装于所述力矩马达部件内,能够耐冲击抗振动;所述力矩马达部件用于产生控制力矩,驱动所述耐应力弹性部件产生可变位移,进而构成气体伺服阀的先导控制桥路,实现对气体伺服阀的控制。本发明利用耐应力弹性部件代替传统的管弹簧,进而控制伺服阀力矩马达位移输出性能,有效解决传统气体伺服阀力矩马达存在的薄壁结构加工困难,不耐冲击振动等环境应力等缺点和限制。

力矩马达计量阀的研究.docx
力矩马达计量阀的研究力矩马达计量阀是一种用于控制液体流量的流量控制器。它在工业控制系统中广泛应用,主要用于流量、压力、温度等参数的控制,能够精确且稳定地控制液体的流量,是流量控制的重要设备之一。力矩马达计量阀的工作原理是利用电动力矩马达控制阀门开度来控制液体流量。它的主要组成部分包括电动力矩马达、计量阀体、阀门、传感器和控制器等。当控制器接收到信号后,它会通过电动力矩马达转动阀门,改变阀门的开度,从而达到控制流量的目的。同时,传感器能够实时检测流量、压力等参数,并将数据反馈给控制器,控制器再根据实际要求调

双喷嘴挡板电液伺服阀力矩马达电磁特性研究.docx
双喷嘴挡板电液伺服阀力矩马达电磁特性研究双喷嘴挡板电液伺服阀力矩马达电磁特性研究摘要:电液伺服系统广泛应用于工业自动化领域,其中双喷嘴挡板电液伺服阀力矩马达是关键设备之一。本文针对双喷嘴挡板电液伺服阀力矩马达的电磁特性进行研究。首先介绍了双喷嘴挡板电液伺服阀力矩马达的工作原理和结构,然后对其电磁特性进行了详细的分析和研究,包括磁场分析、电磁力分析和电感分析。通过实验验证了理论分析结果,并对其影响因素进行了讨论。最后总结了研究结果,并对进一步的研究方向提出了建议。关键词:双喷嘴挡板;电液伺服阀;力矩马达;电