
基于立体视觉的车辆检测与运动估计方法研究的开题报告.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于立体视觉的车辆检测与运动估计方法研究的开题报告.docx
基于立体视觉的车辆检测与运动估计方法研究的开题报告一、选题背景和意义现代社会中,机动车辆的数量不断增加,同时交通事故也日益增多。车辆的检测与运动估计是自动驾驶等应用领域中一个重要的研究方向。而基于立体视觉的车辆检测与运动估计方法是近年来的研究热点之一,其具有精度高、鲁棒性好、能够在复杂环境下实现高效检测等优点。二、研究内容及方法本文将围绕立体视觉的车辆检测与运动估计方法展开研究。首先,对立体视觉技术和车辆检测与运动估计相关理论进行系统的学习和总结。对传统的立体视觉算法(例如基于SIFT特征点匹配的方法、基

基于立体视觉的车辆检测与运动估计方法研究的任务书.docx
基于立体视觉的车辆检测与运动估计方法研究的任务书任务书一、任务背景随着人口的增长和城市化的加速,交通流量不断增加,对道路安全和公共交通的要求也越来越高。车辆检测和运动估计是计算机视觉领域中的重要研究方向,具有广泛的应用前景,在自动驾驶、智能交通管理、车道保持等方面都具有重要的作用。传统的车辆检测和运动估计方法主要基于单目图像,但由于单目图像的限制,对于车辆的密度、超车、掉头等场景的处理效果并不理想。而基于立体视觉的车辆检测和运动估计方法可以通过获取车辆的准确深度信息,来实现对于车辆密度、超车等复杂场景的高
基于双目立体视觉运动估计方法、电子设备、车辆和介质.pdf
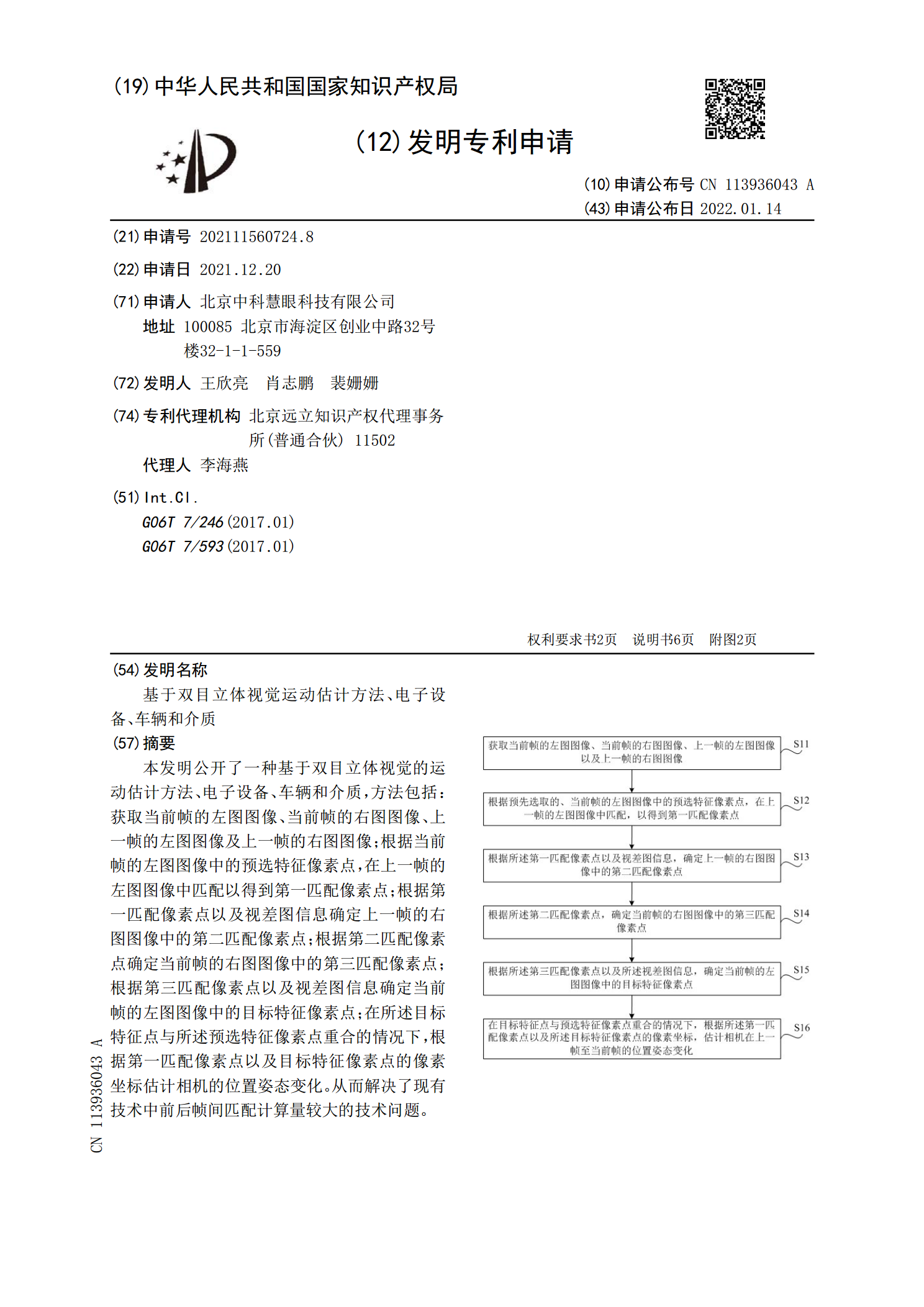
本发明公开了一种基于双目立体视觉的运动估计方法、电子设备、车辆和介质,方法包括:获取当前帧的左图图像、当前帧的右图图像、上一帧的左图图像及上一帧的右图图像;根据当前帧的左图图像中的预选特征像素点,在上一帧的左图图像中匹配以得到第一匹配像素点;根据第一匹配像素点以及视差图信息确定上一帧的右图图像中的第二匹配像素点;根据第二匹配像素点确定当前帧的右图图像中的第三匹配像素点;根据第三匹配像素点以及视差图信息确定当前帧的左图图像中的目标特征像素点;在所述目标特征点与所述预选特征像素点重合的情况下,根据第一匹配像素

基于立体视觉的运动目标检测与跟踪算法研究的开题报告.docx
基于立体视觉的运动目标检测与跟踪算法研究的开题报告一、研究背景随着智能交通、自动驾驶等领域的快速发展,运动目标检测与跟踪技术受到越来越多的关注。立体视觉是一种通过利用两个或多个摄像机,通过三角测量原理计算出三维点坐标的图像处理技术。利用立体视觉技术,可以获取物体的深度信息,从而提高运动目标检测与跟踪的准确性。目前,大多数运动目标检测与跟踪算法主要基于单张图像或视频流,难以有效避免目标遮挡、光照变化等问题,而立体视觉技术可以解决这些问题,提高运动目标检测与跟踪的精度和鲁棒性。二、研究内容本文旨在研究基于立体

动态环境下基于视觉的自运动估计与环境建模方法研究的开题报告.docx
动态环境下基于视觉的自运动估计与环境建模方法研究的开题报告一、选题背景与意义现代社会科技不断进步,人类生活也越来越依赖于机器视觉等新兴技术,无人驾驶、智能家居等已经成为当下热门应用。其中基于视觉的自动化技术是备受关注的方向,其应用覆盖范围广泛,比如自动驾驶、无人机、智能家居、安防监控等等。自运动估计是基于视觉的自动化技术中的一项重要技术,该技术主要根据物体运动的规律或者相邻时刻的图像间差异来获取物体运动的信息,实现物体运动状态的估计。同时,环境建模也是自动驾驶、机器人导航等领域中关键的技术。环境建模要求根