
欠驱动苹果采摘末端执行器研究和设计的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

欠驱动苹果采摘末端执行器研究和设计的任务书.docx
欠驱动苹果采摘末端执行器研究和设计的任务书任务书一、任务目的和背景苹果采摘末端执行器是现代农业技术的一种应用。对于果农来说,采摘果实是一项非常重要的工作,但这项工作非常辛苦,需要花费很多时间和精力。因此,设计一种能够自动采摘或协助采摘果实的末端执行器对于果农来说是一个非常重要的任务。本项目旨在设计一种能够自动采摘苹果的末端执行器,从而提高果农的生产效率和收益。二、任务描述1.任务目标:设计一种能够自动采摘苹果的末端执行器。2.任务要求:(1)实现末端执行器的自动化操作,包括自动识别苹果的位置和大小,并采集

欠驱动苹果采摘末端执行器研究和设计的综述报告.docx
欠驱动苹果采摘末端执行器研究和设计的综述报告近年来,随着农业技术的不断发展,智能农业逐渐成为农业发展的主流趋势。其中,苹果采摘机器人得到了广泛的关注和研究。末端执行器是机器人中不可或缺的组成部分,是机器人与目标物体进行交互的部分,苹果采摘末端执行器的研究和设计对于提高苹果采摘机器人的采摘效率和准确度具有重要意义。1.欠驱动末端执行器的概念和特点欠驱动末端执行器是机器人末端执行器类型之一,也称为柔性机构。相比较传统末端执行器,欠驱动末端执行器具有柔性变形、可重构性、轻量化和成本低等特点。欠驱动末端执行器一般

欠驱动采摘机械手末端执行器装置.pdf
本发明公开了一种欠驱动采摘机械手末端执行器装置。包括结构相同的三个手指,传动机构,三块接触板,三根连杆,驱动杆和转动盘;每个手指具有三个关节,手指第一关节的一端均匀安装在转动盘上,每个手指都装有接触板。具体工作原理是:驱动杆在电机的驱动下移动,通过连杆带动3个手指相向运动闭拢,当手指上的接触板接触到果蔬时,果蔬会推动接触板滑动,驱动手指第二关节内部不完全齿轮运动,与之啮合的齿轮带动手指第三关节运动,接触板表面的力传感器测试到预定的抓取力时,将信号反馈给电机,控制驱动杆停止移动,电机再驱动转动盘转动,实现果

苹果采摘机器人末端执行器的设计与研究的任务书.docx
苹果采摘机器人末端执行器的设计与研究的任务书任务书:苹果采摘机器人末端执行器的设计与研究一、任务目的设计并研究一款适用于苹果采摘机器人的末端执行器,实现自动化采摘过程,提高采摘效率,节约人力成本,同时保证采摘质量。二、任务范围1.了解苹果采摘机器人的相关知识和设计要求,明确末端执行器的使用环境和采摘方式;2.进行末端执行器的结构设计和制造,明确机械结构和运动学性能;3.选用合适的传动方式和驱动方式,考虑执行器的精度和稳定性;4.对末端执行器进行控制系统的设计和开发,考虑控制算法和控制器的硬件选型。三、研究
一种欠驱动采摘机械手末端执行器及采摘方法.pdf
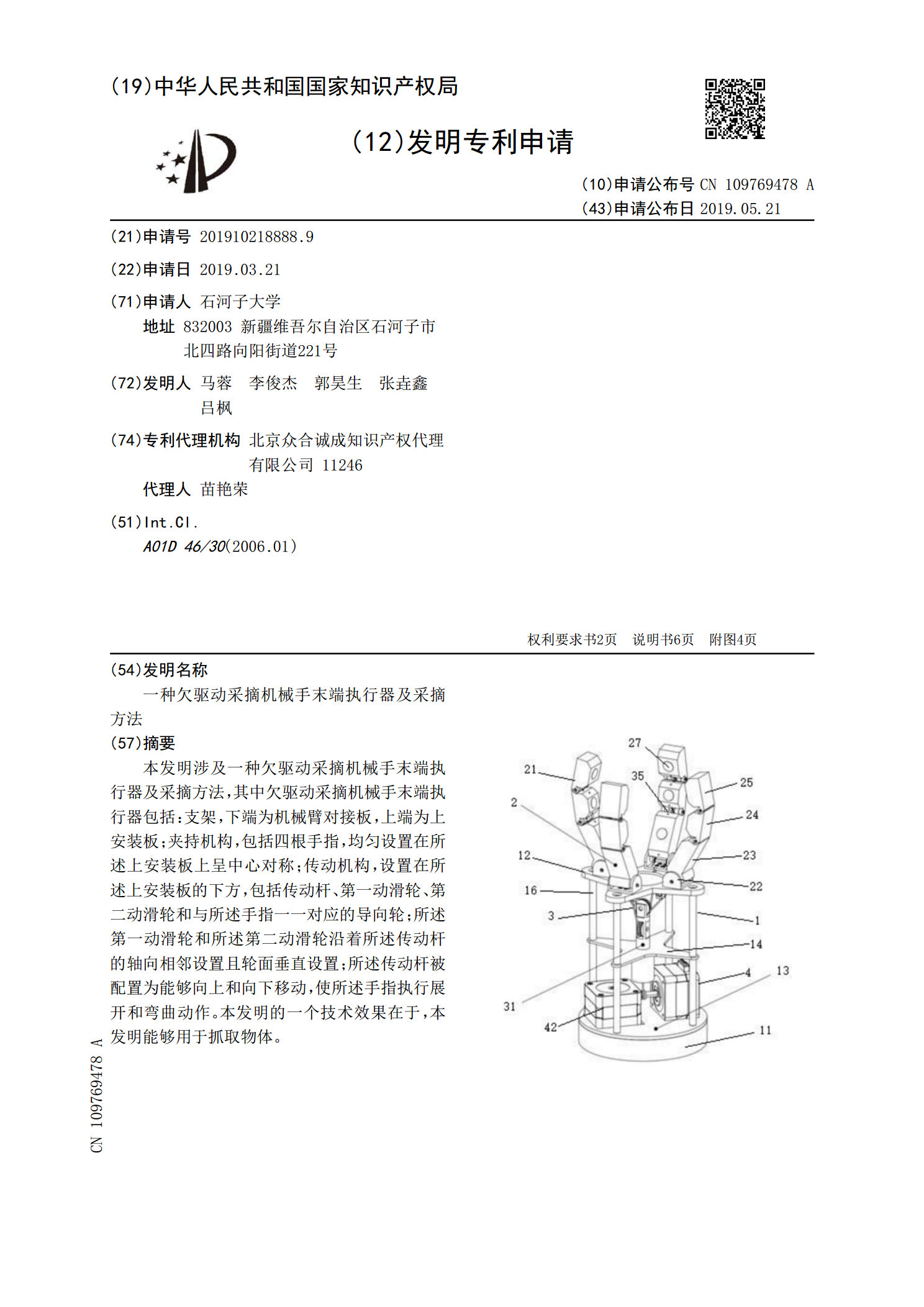
本发明涉及一种欠驱动采摘机械手末端执行器及采摘方法,其中欠驱动采摘机械手末端执行器包括:支架,下端为机械臂对接板,上端为上安装板;夹持机构,包括四根手指,均匀设置在所述上安装板上呈中心对称;传动机构,设置在所述上安装板的下方,包括传动杆、第一动滑轮、第二动滑轮和与所述手指一一对应的导向轮;所述第一动滑轮和所述第二动滑轮沿着所述传动杆的轴向相邻设置且轮面垂直设置;所述传动杆被配置为能够向上和向下移动,使所述手指执行展开和弯曲动作。本发明的一个技术效果在于,本发明能够用于抓取物体。