
行星轮式巡检机器人变胞移动机构的设计与研究的开题报告.docx

骑着****猪猪


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

行星轮式巡检机器人变胞移动机构的设计与研究的开题报告.docx
行星轮式巡检机器人变胞移动机构的设计与研究的开题报告一、选题背景随着航天技术的不断发展和探索范围的不断拓展,行星探测任务也越来越多。然而,由于行星的制造成本较高,操作难度大,环境复杂,使得人类难以直接进行实地探测,因此需要一些特殊的工具来代替人类完成行星的勘探与探测。在此背景下,行星轮式巡检机器人的研发应运而生。行星巡检机器人能够在行星表面工作,完成对行星表面物质的采集、测试等工作,具有很高的科学价值和应用前景。然而,受制于行星表面的环境复杂和地形问题,机器人的行动不可避免会遭遇到障碍物、坑洼等不平路面,

行星轮式巡检机器人变胞移动机构的设计与研究的任务书.docx
行星轮式巡检机器人变胞移动机构的设计与研究的任务书任务书题目:行星轮式巡检机器人变胞移动机构的设计与研究任务背景:随着机器人技术的不断发展,机器人已经开始逐渐代替人类进行一些危险、繁琐的操作任务。行星轮式巡检机器人已经成为一种常见的机器人类型,在探测行星、地球等天体时有着广泛的应用。然而,不同的行星对机器人的移动方式提出了不同的要求。在行星表面极端恶劣的环境下,机器人如何高效、快速地完成巡检任务,成为了研究的重点。任务目标:本项目旨在研究行星轮式巡检机器人的变胞移动机构,设计一种适用于不同行星表面的多肢机
行星轮式变胞移动机构.pdf
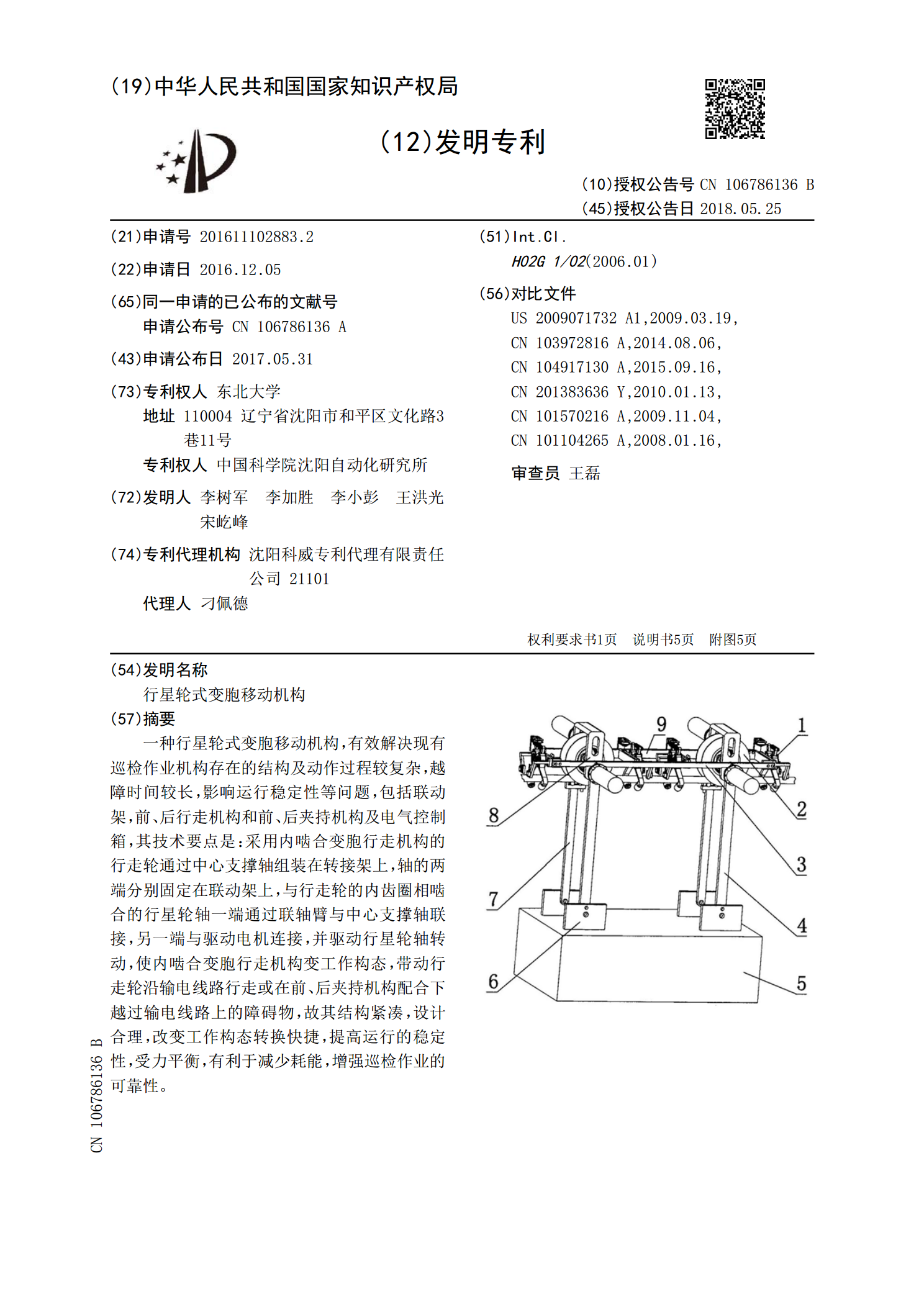
一种行星轮式变胞移动机构,有效解决现有巡检作业机构存在的结构及动作过程较复杂,越障时间较长,影响运行稳定性等问题,包括联动架,前、后行走机构和前、后夹持机构及电气控制箱,其技术要点是:采用内啮合变胞行走机构的行走轮通过中心支撑轴组装在转接架上,轴的两端分别固定在联动架上,与行走轮的内齿圈相啮合的行星轮轴一端通过联轴臂与中心支撑轴联接,另一端与驱动电机连接,并驱动行星轮轴转动,使内啮合变胞行走机构变工作构态,带动行走轮沿输电线路行走或在前、后夹持机构配合下越过输电线路上的障碍物,故其结构紧凑,设计合理,改变

绝缘子检测机器人变胞移动机构的设计与研究的开题报告.docx
绝缘子检测机器人变胞移动机构的设计与研究的开题报告一、选题的背景和意义随着电力行业的发展和智能化的迅速推进,电力设备逐渐实现自动化和智能化。在此背景下,绝缘子检测机器人的应用成为了电力行业智能化改造的重要内容之一。绝缘子是电力系统中非常重要的组成部分,其作用是支撑线路和隔离导线与杆塔的接触,保证电力系统的稳定运行。但是,绝缘子在长期使用过程中会出现损坏和老化的情况,如果不及时检测和维修就会影响电力系统的正常运行。因此,绝缘子的检测非常重要,能够大大提高电力系统的安全性和稳定性。目前,绝缘子的检测主要由工作

变胞式刚柔耦合机器人的设计与实验研究的开题报告.docx
变胞式刚柔耦合机器人的设计与实验研究的开题报告一、研究背景随着机器人技术的不断发展,机器人在工业生产、医疗护理、家庭服务等领域都有广泛应用。然而,传统机器人普遍存在着刚性大、不适合与人类进行密切接触等缺点。为了解决这一问题,研究人员开始着眼于柔性材料和柔性结构的应用,变胞式刚柔耦合机器人被提出。变胞式刚柔耦合机器人能够通过改变其结构形态,实现机器人的柔性变形和自适应控制,使得机器人更适应实际环境。因此,变胞式刚柔耦合机器人被广泛应用于医疗机器人、特种机器人、救援机器人等领域。二、研究内容和意义本课题旨在设