
柔顺膝关节康复器结构及控制技术研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

柔顺膝关节康复器结构及控制技术研究的任务书.docx
柔顺膝关节康复器结构及控制技术研究的任务书任务书课题名称:柔顺膝关节康复器结构及控制技术研究任务背景:随着人口老龄化和运动伤害的增加,膝关节疾病已成为常见的健康问题之一。膝关节疾病会影响个体的生活质量和身体健康,给社会和经济带来不利影响。针对膝关节康复,现有的物理治疗方法如手动按摩、拉伸、锻炼等,需要大量人力物力支持,同时患者需要长时间的康复治疗。因此,针对膝关节康复的自动化康复机器人逐渐成为一个发展趋势。柔顺膝关节康复器作为一种类似于康复机器人的康复设备,具有可重复性、无疲劳、可减轻医护人员的压力等优势

柔顺主-被动膝关节康复训练技术研究的任务书.docx
柔顺主-被动膝关节康复训练技术研究的任务书任务书项目名称:柔顺主-被动膝关节康复训练技术研究1.项目背景膝关节是人体重要的关节之一,也是容易受伤的关节之一。膝关节受伤后需要进行康复训练来恢复功能,但传统的康复训练方法存在一些问题,如进展缓慢、难以进行准确控制等。因此,开发一种新的康复训练技术对于改善膝关节康复效果具有重要意义。2.研究目标本项目旨在研究柔顺主-被动膝关节康复训练技术,通过合理的训练方法和设备设计,提高膝关节康复训练的效果和安全性。具体研究目标包括:(1)开发一种柔顺主-被动膝关节康复训练设

一种柔顺驱动膝关节康复辅助装置.pdf
本发明公开了一种柔顺驱动膝关节康复辅助装置。膝关节康复治疗亟需能提供柔顺性的膝关节辅助康复装置。本发明的助力弹簧连接下支撑板和助力弹簧连接线;助力弹簧连接线连接上连接板;步进电机的底座和上连接板固定在中空旋转平台的外圈两侧;大腿连接机构与上连接板固定;中心轴通过两个单向轴承支承在轴承套上,轴承套与中空旋转平台的内圈固定;中空旋转平台的外圈与内圈构成转动副;步进电机驱动中空旋转平台的内圈;中心轴与弹簧盘的内圈固定;弹簧盘的外圈与十字支撑架及下连接板的一端固定后,弹簧盘的内圈支承在中心轴上;下连接板的另一端与

助力式膝关节康复器设计的任务书.docx
助力式膝关节康复器设计的任务书任务书项目名称:助力式膝关节康复器设计项目背景:膝关节是人体最常用的关节之一,也是其中最复杂的关节之一。膝关节由股骨、胫骨和髌骨组成,通过肌肉、韧带和软骨等组织协调运动。由于各种原因,如年龄、运动损伤、疾病等,膝关节疾病和损伤越来越普遍,影响人们的日常生活和工作。膝关节康复是一项复杂的任务,需要长时间的康复训练,注重运动的正确姿势和逐渐增加的运动量。为了更好地帮助患者康复,市场上出现了很多种膝关节康复器,但是大多数膝关节康复器存在一定的不足之处,如难以调节力量、不够舒适等。本
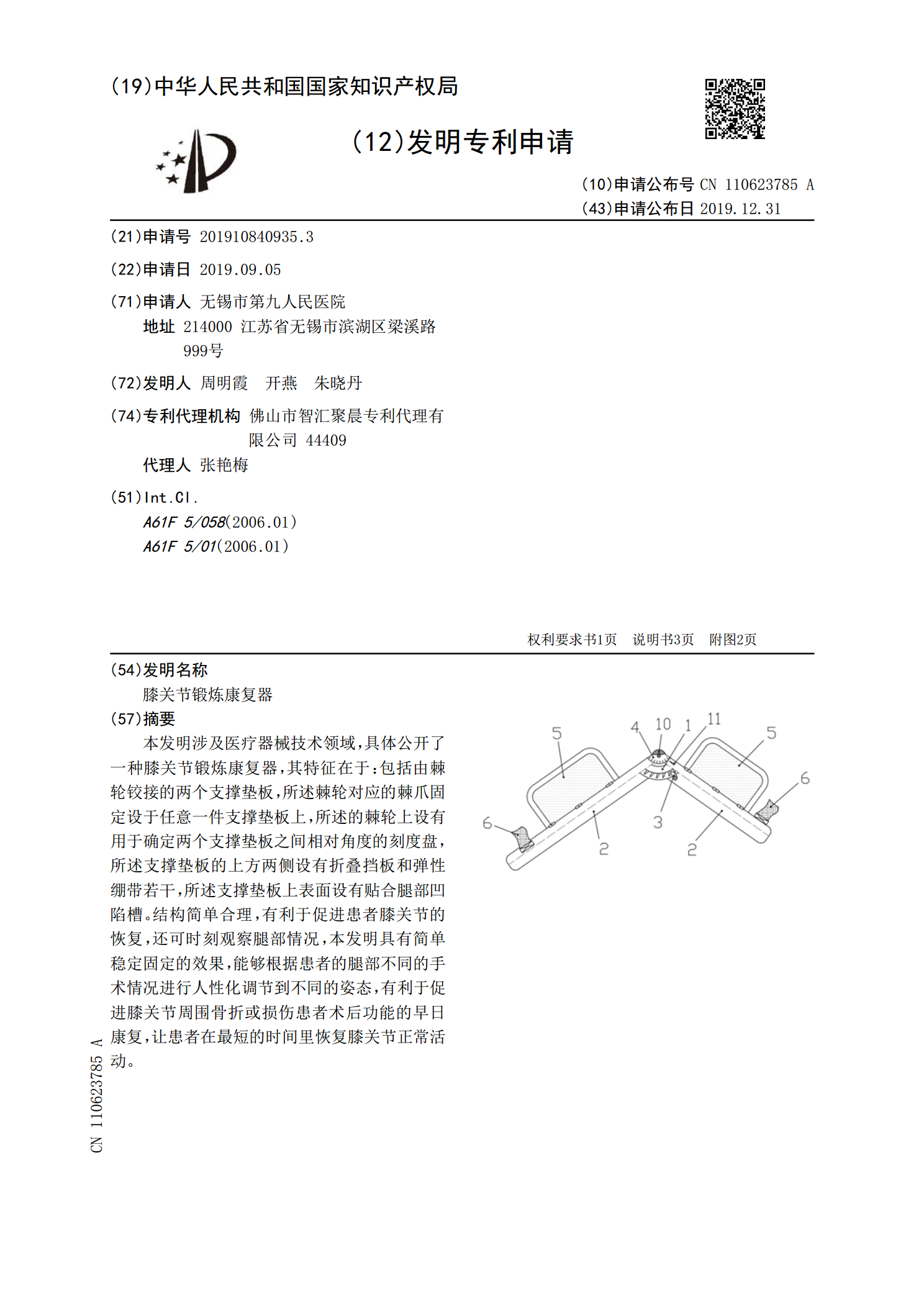
膝关节锻炼康复器.pdf
本发明涉及医疗器械技术领域,具体公开了一种膝关节锻炼康复器,其特征在于:包括由棘轮铰接的两个支撑垫板,所述棘轮对应的棘爪固定设于任意一件支撑垫板上,所述的棘轮上设有用于确定两个支撑垫板之间相对角度的刻度盘,所述支撑垫板的上方两侧设有折叠挡板和弹性绷带若干,所述支撑垫板上表面设有贴合腿部凹陷槽。结构简单合理,有利于促进患者膝关节的恢复,还可时刻观察腿部情况,本发明具有简单稳定固定的效果,能够根据患者的腿部不同的手术情况进行人性化调节到不同的姿态,有利于促进膝关节周围骨折或损伤患者术后功能的早日康复,让患者在