
无人飞行器飞行仿真平台的设计与控制研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无人飞行器飞行仿真平台的设计与控制研究的任务书.docx
无人飞行器飞行仿真平台的设计与控制研究的任务书任务书一、任务背景随着无人飞行器技术的不断发展,无人飞行器的应用领域也在不断拓展。然而,为了更好地开发和应用无人飞行器,需要先建立一个仿真平台,用于飞行控制系统的测试和验证。因此,本研究旨在设计并控制一个无人飞行器飞行仿真平台。二、任务目标1.设计一个无人飞行器仿真模型;2.构建无人飞行器飞行仿真平台,实现仿真模型的飞行;3.设计控制算法,使无人飞行器在仿真平台上进行自主飞行。三、任务内容1.研究无人飞行器的基础知识,包括无人飞行器的起源及种类、无人飞行器的构

无人飞行器控制系统、无人飞行器控制方法、及程序.pdf
本发明确保无人飞行器飞行时的稳定性。无人飞行器控制系统(1)的第1获取设备(101)获取第1信息,该第1信息是用来使飞行中的无人飞行器(10)动作的信息、与无人飞行器(10)的动作的检测结果相关的信息中的至少一个。第2获取设备(102)获取第2信息,用于在无人飞行器(10)的控制切换后,使无人飞行器(10)动作。飞行控制设备(104)基于第1信息及第2信息,对切换为基于第2信息控制无人飞行器(10)进行限制。
一种无人飞行器飞行控制方法、系统及无人飞行器.pdf
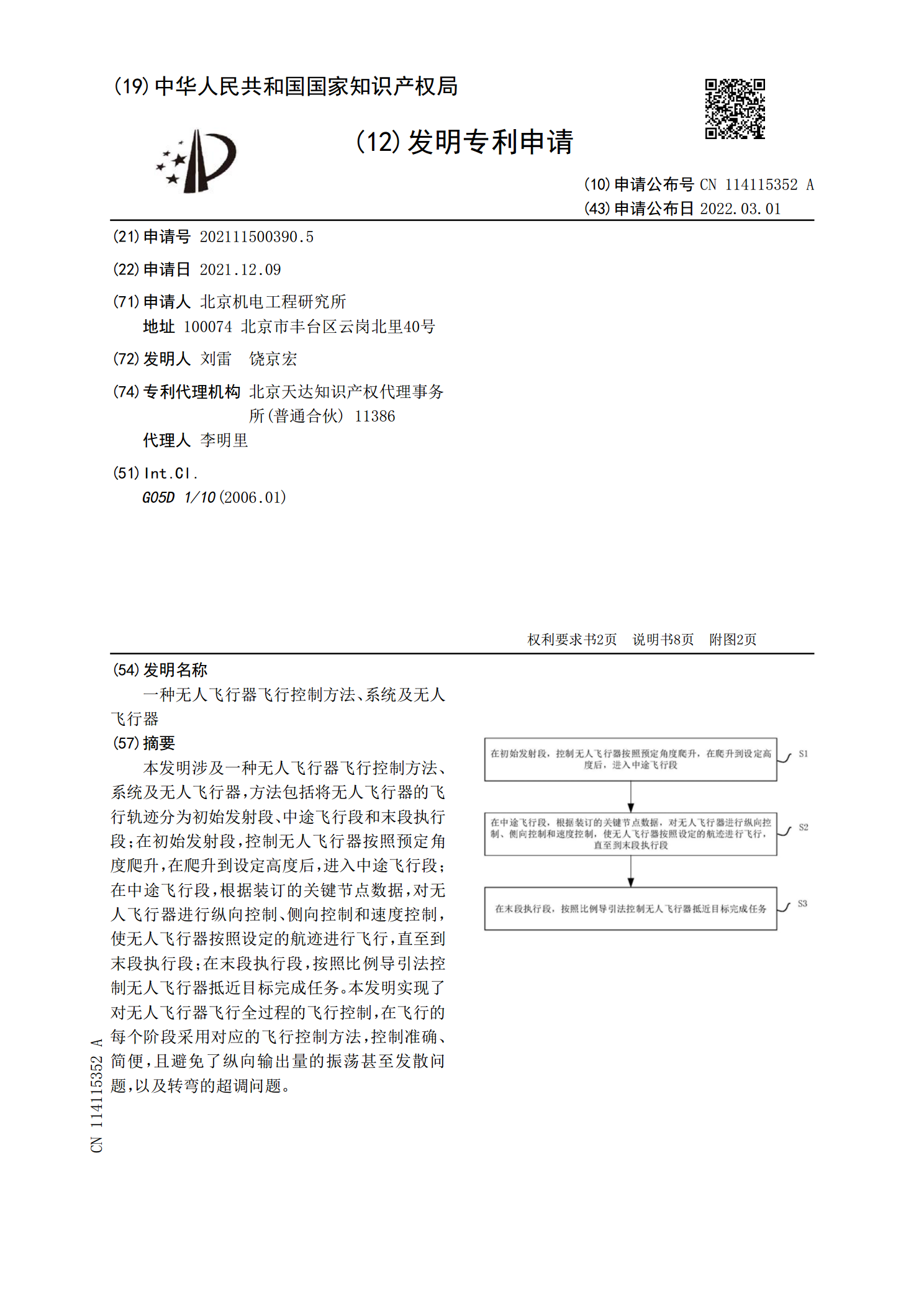
本发明涉及一种无人飞行器飞行控制方法、系统及无人飞行器,方法包括将无人飞行器的飞行轨迹分为初始发射段、中途飞行段和末段执行段;在初始发射段,控制无人飞行器按照预定角度爬升,在爬升到设定高度后,进入中途飞行段;在中途飞行段,根据装订的关键节点数据,对无人飞行器进行纵向控制、侧向控制和速度控制,使无人飞行器按照设定的航迹进行飞行,直至到末段执行段;在末段执行段,按照比例导引法控制无人飞行器抵近目标完成任务。本发明实现了对无人飞行器飞行全过程的飞行控制,在飞行的每个阶段采用对应的飞行控制方法,控制准确、简便,且

四旋翼无人飞行器飞行控制系统设计的任务书.docx
四旋翼无人飞行器飞行控制系统设计的任务书任务书一、任务目标本项目旨在设计一款四旋翼无人飞行器的飞行控制系统。该控制系统应能够实现四旋翼无人飞行器的稳定飞行和精确操控,并能够实现一定程度的自主飞行功能。同时,该系统应具备通用性和可扩展性,以便能够适应不同的应用场景和需求。二、任务内容本项目的任务内容主要包括以下方面:1.系统架构设计:根据四旋翼无人飞行器的特点和飞行控制的需求,设计系统的整体结构,确定各模块之间的关系和功能。2.传感器集成:选用合适的传感器,并将其集成到系统中,以便获取关键的飞行状态信息,如

无人自转旋翼机的仿真与飞行控制研究的任务书.docx
无人自转旋翼机的仿真与飞行控制研究的任务书任务书一、项目背景无人自转旋翼机是一种以垂直起降、轴对称机身和旋转翼作为主要飞行控制手段的无人机器人。它具有垂直起降和空中悬停的能力,能够在狭小的空间中实现复杂机动,具有重要的应用价值,被广泛应用于军事、民用、科研等领域。本研究旨在对无人自转旋翼机进行仿真模拟与飞行控制研究,探索可行的控制算法,提高无人自转旋翼机的控制精度和稳定性,为实际应用提供技术支持。二、研究目标1.建立无人自转旋翼机的仿真模型,包括机体、电动机、旋转翼、姿态传感器等。2.设计控制算法,包括姿