
腹腔微创手术机器人远心机构和手术器械的设计与误差研究的任务书.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

腹腔微创手术机器人远心机构和手术器械的设计与误差研究的任务书.docx
腹腔微创手术机器人远心机构和手术器械的设计与误差研究的任务书任务书一、任务背景随着医疗技术的不断发展和进步,手术机器人作为当今最先进的手术器械之一,其应用越来越广泛,并在临床手术中得到了广泛的应用。手术机器人的出现,极大地提高了手术的准确性和安全性,并且减少了患者的疼痛和手术的创伤。机器人手术的发展,为微创手术技术提供了可能,这使得手术的恢复时间更短,出血风险更低,患者的痛苦更轻。在众多的手术机器人中,腹腔微创手术机器人在医学中应用最为广泛,已成为外科手术的首选。然而,机器人手术技术的发展也存在一些问题,

腹腔微创手术机器人远心机构和手术器械的设计与误差研究的开题报告.docx
腹腔微创手术机器人远心机构和手术器械的设计与误差研究的开题报告摘要近年来,腹腔微创手术机器人获得了广泛的应用。与传统手术相比,腹腔微创手术具有许多优势,如较小的创伤、较小的出血和较短的住院时间等。然而,在机器人手术中,机器人远心机构和手术器械的设计和控制存在一定的误差,这对手术的准确性和安全性有很大的影响。因此,本文旨在研究腹腔微创手术机器人远心机构和手术器械的设计与误差,并提出相应的解决方案。第一部分:引言腹腔微创手术机器人是一种用于腹腔内手术的机器人。与传统手术相比,腹腔微创手术具有许多优势,如较小的
腹腔微创手术机器人用夹钳式手术器械.pdf
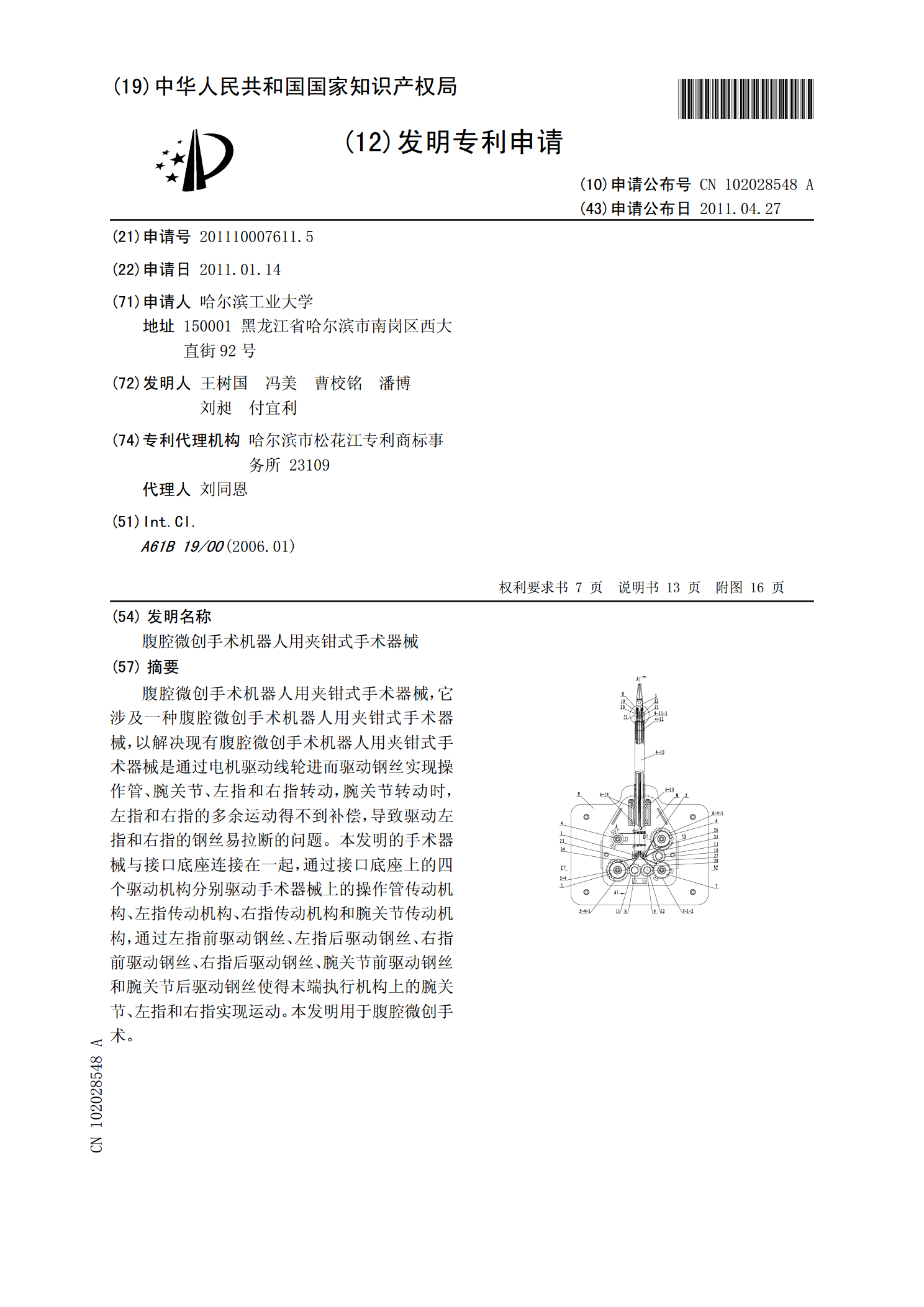
腹腔微创手术机器人用夹钳式手术器械,它涉及一种腹腔微创手术机器人用夹钳式手术器械,以解决现有腹腔微创手术机器人用夹钳式手术器械是通过电机驱动线轮进而驱动钢丝实现操作管、腕关节、左指和右指转动,腕关节转动时,左指和右指的多余运动得不到补偿,导致驱动左指和右指的钢丝易拉断的问题。本发明的手术器械与接口底座连接在一起,通过接口底座上的四个驱动机构分别驱动手术器械上的操作管传动机构、左指传动机构、右指传动机构和腕关节传动机构,通过左指前驱动钢丝、左指后驱动钢丝、右指前驱动钢丝、右指后驱动钢丝、腕关节前驱动钢丝和腕
腹腔微创手术机器人末端执行机构的设计和实现.pdf
第卷第〕,器人,年片机文章编号《又一《抖一腹腔微创手术机器人末端执行机构的设计和实现冯美,付宜利,潘博,朴明波哈尔滨工业人学机器人技术与系统国家重点实验室,黑龙江哈尔滨巧摘要为了提高腹腔微创手术的安全性,设计了一种新型的腹腔微创手术机器人末端执行机构,用于夹持手术器械根据腹腔微创手术的特点和技术要求,采用轴驱动和平行四杆的运动原理设计定点机构详细介绍了末端执行机构的机械结构,应用一法和矢量代数法给出了各个关节的运动学解公式,研究了控制系统的硬件结构和软件系统,并进行了样机实验实验表明所设计的末端执行机构具

一种新型微创手术机器人远心定位机构的研究.docx
一种新型微创手术机器人远心定位机构的研究摘要:微创手术在减轻手术创伤,缩短恢复期等方面有着巨大的优势和前景。为了促进微创手术的发展,需要研究创新的手术机器人技术。本文通过设计一种新型远心定位机构,提高了手术机器人在进行微创手术时的精度和效率。关键词:微创手术,手术机器人,远心定位机构,精度,效率。正文:1.引言微创手术是指在尽可能减少切口的情况下进行手术的方法。相较于传统手术,微创手术有着明显的优势,如:缩小手术创伤、减少出血量、减少疼痛、恢复时间更短等。随着科学技术的不断进步和手术机器人技术的快速发展,