
位移和振动检测仪表.ppt

快乐****蜜蜂


1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

位移和振动检测仪表.ppt
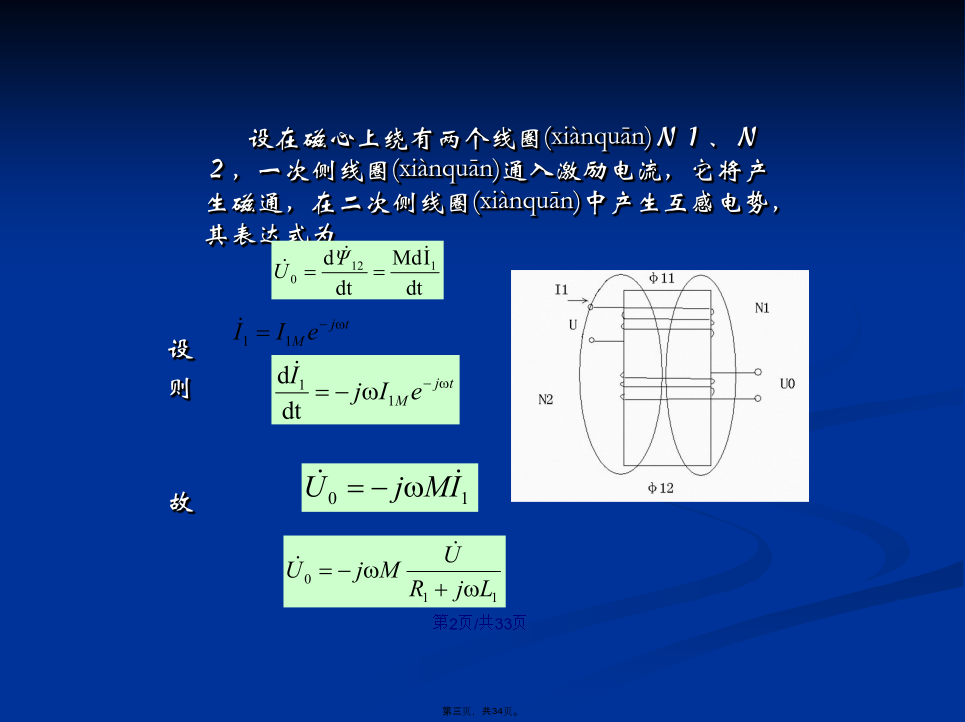
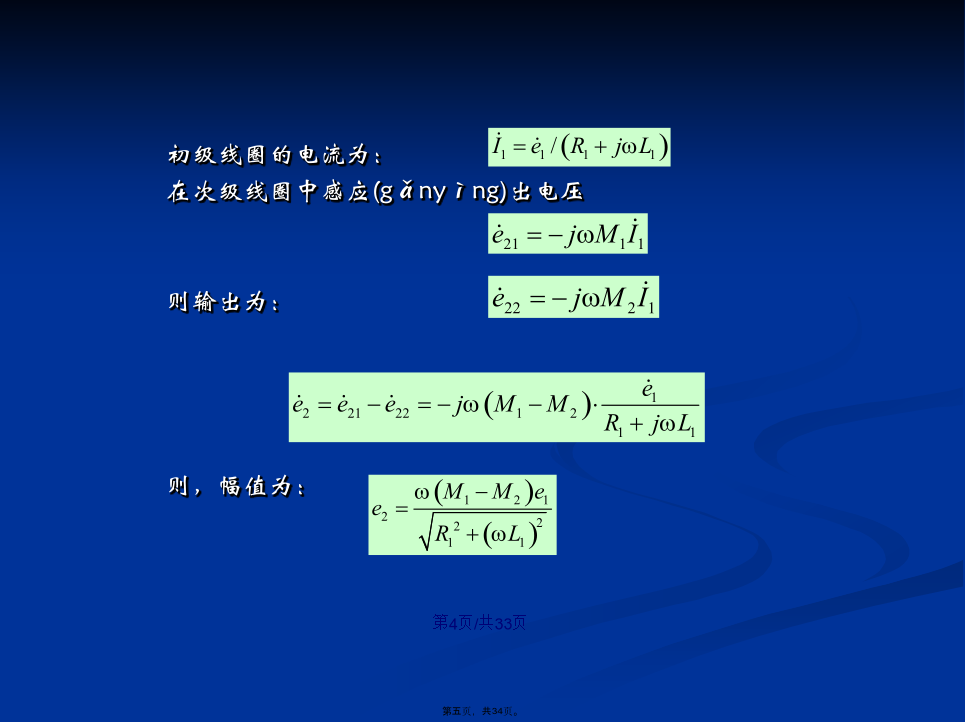
会计学第一节差动变压器式位移检测仪表一、结构和工作原理变压器式传感器是将非电量转换(zhuǎnhuàn)为线圈间互感M的一种磁电机构,很象变压器的工作原理,因此常称变压器式传感器。这种传感器多采用差动形式。设在磁心上绕有两个线圈(xiànquān)N1、N2,一次侧线圈(xiànquān)通入激励电流,它将产生磁通,在二次侧线圈(xiànquān)中产生互感电势,其表达式为设则故等效电路初级线圈的电流为:,在次级线圈中感应(gǎnyìng)出电压则输出为:则,幅值为:铁芯处于中间(zhōngjiān)位置
核电站仪表岗前培训-位移和振动检测仪表.ppt
第五章位置检测仪表第一节差动变压器式位移检测仪表一、结构和工作原理变压器式传感器是将非电量转换为线圈间互感M的一种磁电机构,很象变压器的工作原理,因此常称变压器式传感器。这种传感器多采用差动形式。设在磁心上绕有两个线圈N1、N2,一次侧线圈通入激励电流,它将产生磁通,在二次侧线圈中产生互感电势,其表达式为设则故等效电路初级线圈的电流为:,在次级线圈中感应出电压则输出为:则,幅值为:铁芯处于中间位置时,M1=M2=M,e2=0;(2)铁芯左移,M1=M+ΔM,M2=M-ΔM,与e21同相。(3)铁芯右移,M

振动位移_.doc
探头、(延伸电缆)、前置器以及被测体构成基本工作系统。前置器中高频振荡电流通过延伸电缆流入探头线圈,在探头头部的线圈中产生交变的磁场。如果在这一交变磁场的有效范围内没有金属材料靠近,则这一磁场能量会全部损失;当有被测金属体靠近这一磁场,则在此金属表面产生感应电流,电磁学上称之为电涡流。与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到改变(线圈的有效阻抗),这一变化与金属体磁导率、电导率、线圈的几何形状、几何尺寸、电流频率以及头部线圈到金属导体表

用光学方法测量振动和位移.docx
用光学方法测量振动和位移光学方法测量振动和位移摘要:本文基于光学方法测量振动和位移的原理和应用进行研究,重点探讨了激光干涉测量、激光多普勒测量和红外测量等方法。通过相应的光学仪器和技术,这些方法在测量振动和位移方面具有高精度和高灵敏度的优势。在现代科学技术领域,光学方法已经成为研究振动和位移的重要工具,为工程研究和应用提供了广阔的空间。关键词:光学;振动;位移;激光干涉;激光多普勒;红外测量引言振动和位移是物体在空间中运动过程中的重要参数,并在工程研究和应用中起着重要作用。光学方法作为测量振动和位移的一种

本特利轴振动和轴位移检修校验.doc
轴振动和轴位移检修校验轴振动和轴位移检修校验一、传感器系统3300XL8mm电涡流传感器系统由以下几部分组成:?3300XL8mm探头?3300XL延伸电缆?3300XL前置器1系统输出正比于探头端部与被测导体表面之间的距离的电压信号。它既能进行静态(位移)测量又能进行动态(振动)测量,主要用于油膜轴承机械的振动和位移测量,以及键相位和转速测量。二、工作原理仪表测量采用趋近电涡流原理。探头由通有高频信号的线圈构成,被测轴金属表面与探头相对位置变化时,形成的电涡流大小改变,使探头内高频信号能量损失大小变化,